Возникающие
при повороте автомобиля боковые силы
вызывают увод колес, что приводит к
отклонению направлений скоростей V
и V![]()
(см. рис.). Углы
и
,
на которые отклоняются направления
скоростей V
и V
за счет увода или бокового скольжения,
развала и кинематики подвески называют
углами увода соответственно передней
и задней осей. Отношение боковой силы,
действующей на ось, к углу её увода
называют к-том сопротивления уводу
данной оси.
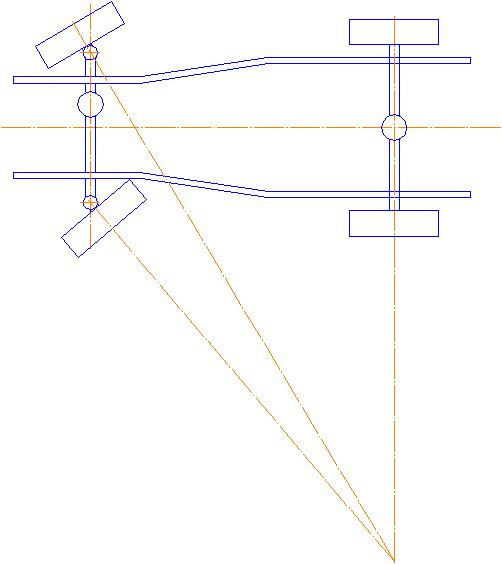
Мгновенным
центром поворота автомобиля является
точка О пересечения перпендикуляров к
направлениям скоростей V
и V
.
Найдем расстояния R
и C
от точки О до продольной оси АБ и задней
оси автомобиля. Для этого опустим
перпендикуляр ОВ на продольную ось.
Угол АОВ =
,
а угол ВОБ =
![]()
—
как углы с перпендикулярными сторонами.
Из треугольников АОВ и ВОБ имеем:
АВ
= С = Rtg
и ВБ = Rtg(
—
).
Складывая
эти два выражения получим:
R
=
![]()
![]()
,
(7.4)
Отсюда:
С =
![]()
,
(7.5)
Радиусом
поворота автомобиля называют расстояние
от центра поворота О до колеи переднего
наружного колеса:
R
=![]()
,
(7.6)
При
больших радиусах поворотов и соответственно
малых углах
величиной 0,5В можно пренебречь и считать
cos(![]()
=1,
тогда R
R.
В дальнейшем при изучении управляемости
разницей между R
и
R
пренебрегаем и называем R
радиусом поворота.
Угловая
скорость поворота автомобиля
=
V
/
R.
Анализируя
полученные выражения, характеризующие
поворот автомобиля, можно сделать вывод
о том, что, если пренебречь уводом осей
центр поворота автомобиля должен
находится на продолжении задней оси
АТС, т.е.:
R
![]()
и С
= 0
Видно,
что при отсутствии увода кинематические
параметры поворота при заданной базе
АТС однозначно определяются величиной
угла
,
а при наличии увода эти параметры зависят
еще и от разности
—
.
Значение и знак этой разности зависят
от боковых сил, действующих на передние
и задние колеса, а также от к-тов
сопротивления уводу этих колес.
Свойства
автомобиля изменять кинематические
параметры поворота под действием внешних
боковых сил при фиксированной величине
угла
называют поворачиваемостью
автомобиля.
При
равенстве углов увода передней и задней
осей (
=
)
автомобиль обладает нейтральной
поворачиваемостью. В этом случае
и
R
остаются
такими же как у автомобиля с жесткими
колесами, однако центр поворота О смещен
относительно оси задних колес.
Вопрос 39. Силы, действующие на автомобиль при повороте.
Движение
автомобиля при его повороте сопровождается
изменением его положения относительно
неподвижной системы координат. Это
движение связано с изменением как
кинематических, так и динамических
(силовых) параметров движения. В целом
движение на повороте может быть описано
следующими характеристиками:
1)
силы инерции, действующие на автомобиль
при повороте Р![]()
.
В
общем случае силы инерции могут быть
представлены в виде продольной
составляющей Р![]()
и поперечной составляющей Р![]()
в системе координат связанной с
автомобилем:
Р
=
m
(j
— V
)
и Р
=
m
(
V
+
d
V
/dt)
Причем,
положительное направление Р
противоположно
направлению движения автомобиля, а
положительное направление Р
—
направление от центра поворота.
При
отсутствии увода и с учетом угла
поворота
,
как основного задающего параметра эти
силы могут быть представлены в следующем
виде:
Р
=
m
(j
— V
b
/L)
и Р
=
m
(
V
+
V
b
/L
+ j
b
/L
)
При
этом составляющая Р
может
быть представлена в виде трех слагаемых:
Р![]()
=
m
V
=
m
V
/R
– проекция центробежной силы на
поперечную ось.
Р![]()
=
m
V
b
/L
– сила, возникающая в результате
изменения угла поворота управляемых
колес и изменения улов увода. При
отсутствии увода эта ситла положительна
при входе в поворот и отрицательна при
выходе. При больших углах увода эта сила
может быть отрицательна при входе в
поворот и положительна при выходе.
Р![]()
=
m
j
b
/L
— сила, возникающая в результате изменения
скорости движения автомобиля на повороте.
При отсутствии увода она положительна
при ускоренном движении и отрицательна
при замедленном. При небольших
и больших уг
лах
увода эта сила может быть положительной
и в процессе замедления.
2)
реакции дороги R![]()
и R![]()
.
В
общем случае: R
=
(Р
b
+ J
)/L
и
R
=
(Р
a
— J
)/L
где:
J
—
момент
инерции автомобиля относительно
вертикальной оси Z,
проходящей через его центр масс.
Учитывая,
что J
=
m
![]()
,
где:
ab,
подставляя
выражения для
Р
и
получим,
без учета увода:
R
=
m
(V
/R
+ V
+ j
)
и
R
=
m
V
/R
Для
установившегося кругового движения:
R
=
m
V
/R
и
R
=
m
V
/R.
Принято
называть удельной боковой силой
![]()
отношение боковой силы, действующей на
оси, к нагрузке, приходящейся на колеса
этой оси.
При
установившемся круговом движении
![]()
=![]()
.
При неустановившемся движении
.
Так, при малых углах увода, при входе в
поворот или ускоренном движении
,
а при выходе из поворота или замедлении
.
С
точки зрения обеспечения устойчивости
движения более желательным является
выполнение условия
.
3)
продольные реакции R
и R
.
Продольные
реакции на ведомых колесах R
при криволинейном движении остаются
практически такими же, как и при
прямолинейном движении.
Для
нахождения продольной реакции на ведущих
колесах R
используют
уравнение движения в направлении
продольной оси, откуда:
R
=
Р
+
R
+ R
+ P
Уравнение
силового баланса при криволинейном
движении можно записать так: Р
=
P
+
P![]()
+
Р
+
Р
+
Р![]()
+
Р![]()
,
где:
Р
—
сила, возникающая в результате изменения
кинетической энергии вращательного
движения автомобиля. При входе в поворот
и при разгоне кинетическая энергия
вращательного движения автомобиля
увеличивается за счет энергии, подводимой
к ведущим колесам от двигателя, а при
выходе из поворота и при снижении
скорости энергия уменьшается, что
приводит к снижению необходимой тяговой
силы.
Р
—
сила
сопротивления движению, возникающая в
результате качения колес на повороте
с уводом. Энергия, затрачиваемая на
увод, теряется безвозвратно.
Р
=
G
![]()
/K![]()
где:
K
=K
K
L
/(
K
a
+
K
b
)
– приведенный
к-т сопротивления уводу всех колес
автомобиля.
4)
нормальные реакции R
на колесах автомобиля.
При
криволинейном движении автомобиля
нормальные реакции существенно отличаются
от тех же реакций при прямолинейном
движении. В результате действия
инерционных сил и моментов в поперечной
плоскости, нормальные реакции
перераспределяются по бортам. В тех
случаях, когда нужно найти реакции,
действующие на каждом из колес, даже у
двуосного автомобиля задача оказывается
статически неопределимой и реакции
могут быть найдены приближенно.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
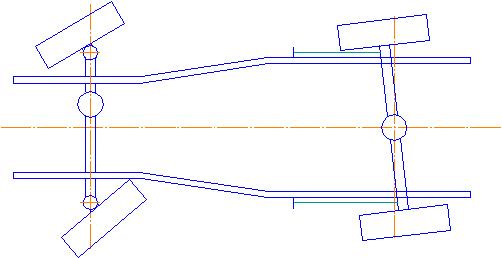
Кинематика поворота автомобиля на абсолютно жестких колесах
Рулевое управление автомобиля должно обеспечивать такую кинематику поворота, при которой продолжнения осей всех колес пересекаются в одной точке, называемой центром поворота:
Кинематика поворота автомобиля
Силовой увод шины
В обычном понимании шина едет прямо, однако, т.к. она не твердая а эластичная, то деформируется под действием сил. Форма беговой дорожки изкривляется и в реальности шина начинает ехать не туда куда направляется, а отклоняется от этого направления на некий угол δ.
Боковые силы, которые действуют на шину:
Центробежная сила в повороте действует на автомобиль и он в свою очередь на шину. Чтобы вызвать силовой увод, достаточно едва заметно вильнуть рулем.
Тила тяжести (тоже действует на машину) а при наличии уклона дороги в бок вызывает силовой увод шины. Любая дорога должна иметь уклон в сторону обочины. Это закладывается в проект для того чтобы с её поверхности стекала вода. Так же плохие дороги имеют множество неровностей втч таких которые вызывают силовой увод шины.
На сопротивление силовому уводу шины влияют следующие факторы:
Конструкция шины (например радиальная жестче диагональной, но и шины одного типа разной конструкции могут иметь разное сопротивление силовому уводу).
Давление в шине. Чем больше давление, тем меньше силовой увод.
Наличие тяги на колесе. Если ось ведущая, то сопротивление силовому уводу меньше. Чем больше тяга на оси, тем слабее шина может сопротивляться силовому уводу.
Соотношение ширины и высоты профиля. Чем меньше в процентном отношении высота профиля, тем больше сопротивление силовому уводу. По этому если стоит вопрос дилема поставить 15” диски или 16” диски при одинаковом внешнем диаметре колеса, лучше выбрать 16-е даже учитывая что они несколько дороже.
Соотношение ширины профиля шины и ширины диска. Чем шире диск, тем лучше шина сопротивляется силовому уводу. Рационально ставить диски, которые на 20% уже профиля колеса. Например если шина имеет ширину профиля 12.5 дюймов или 315мм, то для неё стоит использовать диски шириной 10J. Среди джиперов принято ставить более узкие диски чтобы уменьшить вероятность разбортировки при стравливании давления для движения по слабым грунтам. Да, всё правильно но принимая такое решение стоит осознавать и отрицательные стороны (чтобы не гадать потом почему машина «рыскает» по дороге на скорости выше 90).
Масса, приходящаяся на колесо. Чем больше масса, тем хуже шина сопротивляется силовому уводу.
Наклон колеса по отношению к плоскости дороги. Сопротивление силовому уводу хуже если колесо наклонено в сторону боковой силы и наоборот.
Угловая жесткость подвески (та самая которая препятствует крену). Чем она больше, тем больше силовой увод шин.
Кинематический увод колеса
Крен кузова может вызвать наклон колеса по отношению к плоскости дороги.
Зависимая подвеска почти не вызывает при крене кузова дополнительный наклон помимо заранее установленной величины развала колес (кроме очень незначительного наклона в результате деформации шин от переноса масс).
Независимая подвеска на двойных поперечных рычагах (ВАЗ-классика, Нива, Митсубуиси Паджеро, Тойота Сурф/Хайлюкс/4Раннер итд) колесо кренится в сторону крена кузова и вызывает дополнительный увод колеса, который на передней поси полезен (но об этом позже).
Независимая подвеска на одном поперечном рычаге (НАМИ-1, на современных автомобилях такая не применяется, лишь её разновидность «на косых рычагах» например на БМВ задняя подвеска) вызывает наклон колеса в сторону, противоположную крену кузова. Такой наклон уменьшает увод, это благоприятно для задней оси.
Макферсон. Как правило вызывает меньший увод чем 2). Так же применима для передней оси автомобиля.
Кинематический увод оси.
Т.к. шарниры рычагов подвески при крене в поворотах описываеют траекторию окружности относительно кузова, то и положение оси относительно кузова меняется. Ось (зависимой подвески) может разворачиваться относительно автомобиля (на большинстве автомобилей так и происходит) и тем самым подруливать в ту или иную сторону. (этот эффект обычно используется для улучшения управляемости).
Поворот автомобиля на эластичных колесах
Недостаточная поворачиваемость
Если увод передней оси больше увода задней оси, то радиус поворота больше чем был бы на жестких колесах. Такие автомобили называются автомобилями с недостаточной поворачиваемостью. При воздействии боковой силы появляется центробежная сила, которая гасит возмущение. Автомобиль устойчив. Курс немного меняется но коррекция рулем компенсирует возмущение. Автомобиль движется прямо, но передние колеса немного повернуты.
Нейтральная поворачиваемость
Если увод осей одинаков, то радиус поворота таков каким он был бы на жестких. Такие автомобили называются автомобилями с нейтральной поворачиваемостью. При появлении боковой силы, автомобиль начинает боком «сползать» с дороги. Коррекция рулем легко компенсирует возмузение. Автомобиль движется немного боком по курсу.
Избыточная поворачиваемость
Если увод передней оси меньше увода задней, то радиус поврота меньше чем был бы на жестких колесах. При воздействии боковой силы появляется центробежная сила, которая не гасит возмущение. Автомобиль не устойчив. Курс меняется, коррекци рулем возможно (не всегда) компенсирует это изменение. Автомобиль движется боком, передние колеса повернуты.
Это самый неприятный эффект. Реально для водителей выглядит как «рысканье» автомобиля по казалось бы прямой дороге на большой скорости.
Автомобилей с чисто нейтральной поворачиваемостью не бывает. Как увод осей автомобиля меняется и по мере поворота рулевого колеса и в зависимости от крена кузова в повороте. Реальный современный автомобиль должен при любых условиях, любой загрузке, любом маневре иметь определенную недостаточную поворачиваемость. На практике борьба за управляемость выглядит как борьба с избыточной поворачиваемостью. Автомобиль с избыточной поворачиваемостью имеет такое понятие как «критическая скорость» выше которой он способен двигаться по криволинейной траектории без поворота руля. Такой автомобиль опасен если его максимальная скорость выше критической.
Методы борьбы с избыточной поворачиваемостью:
На передней оси:
Положительный развал передних колес автомобиля (колеса наклонены наружу).
Увеличение наклона колеса наружу поворота при крене. Этот метод доступен только на независимых подвесках.
Увеличение угловой (против крена) жесткости ПЕРЕДНЕЙ подвески относительно задней. Рекомендуется имеет соотношение угловых жесткостей передней относительно задней в диапазоне 1.4-2.6. Угловая жесткость подвески зависит от:
Рессорной (пружинной) колеи (расстояние между центрами рессор или пружин). Чем больше расстояние, тем больше угловая жесткость. Вот тут проблема т.к. на передней оси как правило поставить пружины/рессоры так же широко как на задней мешают поворотные кулаки. Тут преимущество имеет независимая подвеска т.к. её пружинная/рессорная колея как правило равна колесной.
Вертикальной жесткости подвески. Тут тоже небольшая нестыковочка. Как правило переменность веса груза, приходящегося на заднюю ось заставляет конструктора поставить более жесткие пружины/рессоры сзади а для управляемости желательно наоборот.
Наличия стабилизатора поперечной устойчивости (но это вредная штука, особенно для джипера. При наезде на препятствие только одним колесом, суммарная жесткость складывается из его жесткости и жесткости основного упругого элемента).
На задней оси:
Отрицательный развал задних колес автомобиля (колеса наклонены внутрь). Возможно только на независимой подвеске ведущей задней оси.
Увеличение наклона колес внутрь поворота при крене. Тоже касается только независимой подвески.
Уменьшение угловой жесткости задней подвески
Обеспечение кинематики направляющего устройства, которая бы при повороте подруливала (разворачивала) ось в сторону поворота. Как правило джиперы дорабатывая автомобили самостоятельно, эту кинематику наоборот портят. Например устанавливая в рессоры дополнительные листы или дополня рессоры пружиными чтобы рессора была сильнее выгнутая (а не прямая) в статическом положении. Подвеска при крене начинает наоборот подруливать в сторону противоположную повороту и делать автомобиль склонным к избыточной поворачиваемости. Подробнее о книематике подвеске в статье (Направляющие устройства подвески)
Установка дифференциала повышенного трения в заднюю ведущую ось (например Quaife, дискового, вискомуфты или Торсен).
Разворот задней оси в сторону поворота с целью снижения склонности автомобиля к избыточной поворачиваемости. Если на заднеприводном автомобиле и не применяется этот приём, то по крайней мере не допускается разворот оси в обратную сторону.
Разворот заднй оси автомобиля в сторону поворота
Влияние типа привода на управляемость автомобиля
Передний привод
Склонен к недостаточной повроачиваемости. Т.к. наличие тяги на оси снижает сопротивление силовому уводу шины, то наличие тяги на передней оси увеличивает силовой увод а её отсутствие на задней оси уменьшает силовой увод задней оси получаем автомобиль склонный к недостаточной поворачиваемости, что в общем благоприятно для автомобиля. Если недостаточная поворачиваемость избыточна, её легко уменьшить кинематикой направляющего устройства задней подвески (легче чем наоборот)
Полный привод
Если не брать во внимание кинематику подвески и соотношение угловых жесткостей, то автомобиль с полным приводом имеет поворачиваемость близкую к нейтральной т.к. тяга у него (как правило межосевой дифференциал либо симметричный либо близок к симметричному) распределяется по осям равномерно и силовой увод шин примерно одинаков. Полный привод заметно снижает требования к подвеске автомобиля. Это то, почему постоянный дифференциальный полный привод нужен не только на нестабильных грунтах, но и на сухом асфальте.
Задний привод
Склонен к избыточной поворачиваемости. Это самая сложная задача для конструктора подвесок. Приходится прибегать к целому ряду мер для снижения склонности автомобиля к избыточной поворачиваемости и идти на ряд компромисов. Список таких мер приводится выше.
Силы, действующие на автомобиль при повороте

Ускорение автомобиля обусловлено равнодействующей всех приложенных к автомобилю сил. Сила тяжести  и сила нормальной реакции
и сила нормальной реакции  направлены вертикально и компенсируют друг друга. Поэтому горизонтально направленное ускорение автомобилю сообщает сила трения покоя между колесами и дорогой. Для нее должно выполняться неравенство
направлены вертикально и компенсируют друг друга. Поэтому горизонтально направленное ускорение автомобилю сообщает сила трения покоя между колесами и дорогой. Для нее должно выполняться неравенство  откуда следует неравенство для допустимой скорости на повороте:
откуда следует неравенство для допустимой скорости на повороте:  Подставляя сюда численные данные, характерные для поворота на городском перекрестке, получаем, что скорость автомобиля на повороте не может превышать
Подставляя сюда численные данные, характерные для поворота на городском перекрестке, получаем, что скорость автомобиля на повороте не может превышать 
Динамика.
2014
В прошлых статьях нашего цикла мы рассмотрели множество вопросов, связанных с движением автомобиля в поворотах – это и силы, действующие на колеса, и методы руления, и необходимость плавности движения. Теперь суммируем все эти знания и рассмотрим подробно действия водителя при прохождении поворотов.
Основные методы руления
Мы подробно рассматривали технику движений рук и определили два основных способа руления – простой и скоростной. В реальной жизни простой способ вам требуется в 90% случаев, т.к. в движении всегда, за исключением случаев заноса на скользкой дороге, требуется поворачивать руль медленно и на небольшие углы.
Крайне важно умело действовать рулевым колесом при прохождении поворотов, т.к. это львиная доля успеха. Технику простого способа руления мы знаем, однако не менее важно ее своевременное применение. Поворот руля простым способом подразумевает то, что руки водителя никогда не отрываются от обода рулевого колеса, последовательно проскальзывая по нему.
Как бы водитель ни старался, если в самом повороте он доворачивает рулевое колесо одной рукой (при одновременном проскальзывании другой руки), движения получаются ступенчатыми. Кроме того, одна рука из-за увеличенной нагрузки способна значительно меньше ощущать реакцию на руле (т.е. то, что происходит с передними колесами), чем две руки. Поэтому, желательно действовать таким образом, чтобы в середине поворота не было необходимости доворачивать руль, а можно было просто удерживать его двумя руками.
Для этого следует заранее, при подъезде к повороту, подхватить руль таким образом, чтобы осуществлять весь маневр двумя руками. Такой метод называется предварительным захватом.
Последовательность действий водителя на примере поворота направо
- Двигаясь по прямой, вы удерживаете руль двумя руками, которые располагаются симметрично.
- Подъезжая к повороту, вы заранее подхватываете руль для удобного выполнения маневра. В данном случае можно правую руку поднять повыше на ободе рулевого колеса, а левую – расположить пониже. В результате, вы подготовились еще до поворота и поворачиваете руль двумя руками, при этом в повороте ваши руки находятся в самых удобных позициях – на противоположных сторонах руля, каждая на своем секторе.
- Соответственно, на пике поворота, когда усилия на руле максимальные, водителю легко удерживать рулевое колесо двумя руками, он тонко чувствует реакцию от колес и может точно дозировать усилия.
- Начало возврата руля также происходит двумя руками.
Таким образом, фазу, когда руки проскальзывают по рулевому колесу можно считать подготовительной, а когда требуется выдерживать самое большое усилие, работают две руки одновременно. Если поворот очень крутой и требуется значительный поворот руля, можно сделать это за 2-3 предварительных захвата.
Грамотное руление в поворотах
Существует также второй важнейший аргумент в пользу предложенной тактики руления в поворотах. Вы уже знаете о том, что по мере увеличения угла поворота руля, увеличиваются боковые силы, действующие на автомобиль. Очень важно выработать такой способ проезда поворотов, при котором водитель поворачивает рулевое колесо на максимально необходимый угол в самом начале.
При этом, с самого начала водитель вызывает максимальные боковые усилия и, если вдруг он понимает то, что переборщил – автомобиль начинает скользить, не вписываясь в поворот, – это происходит в самом начале маневра, т.е. тогда, когда имеется еще достаточно места и времени для исправления ситуации.
В результате у водителя имеются возможности для контраварийных действий. Если же при проезде поворота водитель постепенно доворачивает руль все больше и больше, то он рискует перейти грань сцепления колес с дорогой в середине или на выходе из поворота – тогда автомобиль немедленно оказывается на встречной полосе или обочине и времени на исправление ситуации уже нет.
Таким образом, важно, чтобы при подъезде к повороту, вы с самого начала повернули руль на необходимый угол, направив автомобиль по желаемой дуге, и в середине поворота удерживали руль неподвижно с последующим плавным возвратом на выходе. Вы с самого начала вызываете максимальные боковые усилия, убеждаетесь, что все в порядке и автомобиль хорошо «держит» дорогу, и проезжаете поворот надежно и быстро по дуге одного радиуса. Метод предварительных захватов позволит вам:
- подхватить руль поудобнее, поворачивая его двумя руками;
- тонко ощутить надежность сцепления колес с дорогой;
- легко удерживать его в середине поворота, когда нагрузки максимальны;
- плавно вернуть руль на выходе из поворота.

Одна из наиболее распространенных ошибок
Многие водители любят выпускать рулевое колесо на выходе из поворота для его самопроизвольного возвращения. Это крайне опасно. Конструкция рулевого управления такова, что руль стремится вернуться назад. Но это сделано не для облегчения работы водителя, а для того, чтобы он ощущал обратную связь от колес.
Руль самопроизвольно никогда не возвращается на такой угол и с такой скоростью, которые нужны водителю, его самопроизвольное движение всегда вносит нестабильность в поведение автомобиля. Поэтому, сопротивляется рулевое колесо или помогает, водитель постоянно поддерживает руки в тонусе, сдерживает руль и вращает его самостоятельно с той скоростью, которая необходима ему в данной ситуации.
Жесткие боковые ускорения, которые возникают при резком самопроизвольном возврате руля, легко могут привести к заносу на скользкой дороге или на высокой скорости. И вообще, водителю следует привыкнуть к мысли о том, что без него в автомобиле ничего не происходит, ничего не двигается.
Важнейшие навыки грамотного водителя
Что еще необходимо для надежного и оптимального прохождения поворотов, так это взгляд вперед. Взгляд вперед на свой будущий путь. Требование с самого начала поставить автомобиль на необходимую дугу в повороте может быть выполнено только в том случае, если поворот заранее оценен водителем.
Кто-то начинает действовать рулем только тогда, когда дорожное полотно пошло в сторону (это может быть уже поздно) или возврат руля осуществляется тогда, когда перед автомобилем показалась прямая (резкий возврат).
При подъезде к повороту, следует смотреть не на его начало, и даже не на середину, а на его окончание. Только тогда водитель видит всю ситуацию в целом, он видит свой будущий путь, понимает к чему нужно готовиться, видит цель и может действовать спокойно, заранее и плавно. Если вы смотрите на середину поворота, то ваш путь до нее будет плавным и надежным. Но затем откроется вторая половина и вы можете столкнуться с необходимостью резкого изменения направления на выходе, а это, как уже говорилось, чревато неприятностями.
Поэтому, смотрите с самого начала на выход из поворота – тогда вы сможете пройти поворот одним оптимальным движением. Вы сможете заранее оценить поворот, его крутизну, выбрать оптимальную траекторию, понять, насколько требуется подхватить руль для необходимого поворота.
О выборе траектории в повороте мы поговорим в следующей статье, а пока приучайтесь просматривать повороты заранее и проезжать их не методом «попадания капотом в дорогу», а по некой кривой, которую вы заранее для себя определили. Выход из поворота является таким же полноценным поворотом, только в другую сторону – к нему также следует готовиться и начинать действия заранее.
Из вышесказанного следует то, что, если поворот «закрытый», т.е. нет возможности просмотреть его до конца заранее, начинайте движение по нему с заведомо малой скоростью. Таким образом, вы сохраняете возможность вносить изменения в случае появления такой необходимости. Быстро и уверенно можно пройти поворот только в случае его полной открытости для вас.
Заключение
Итак, соберем всю известную информацию и подытожим действия водителя при проезде поворота. При подъезде к повороту водитель:
- просматривает его заранее;
- снижает скорость до необходимого уровня и включает необходимую передачу;
- подхватывает руль поудобнее (заметьте, все это происходит на прямой до поворота);
- поворачивает рулевое колесо на необходимый угол, направляя автомобиль по желаемой траектории;
- проезжает поворот по дуге постоянного радиуса с ровной скоростью.
На выходе из поворота по мере возврата руля, а соответственно и уменьшения боковых сил, водитель может добавлять газ, плавно разгоняясь. Именно в таком стиле вы сможете проезжать повороты быстро и, главное, – надежно и безопасно.