Тягово-скоростные
свойства имеют важное значение при
эксплуатации автомобиля, так как от
них во многом зависят его средняя
скорость движения и производительность.
При благоприятных тягово-скоростных
свойствах возрастает средняя скорость,
уменьшаются затраты времени на перевозку
грузов и пассажиров, а также повышается
производительность автомобиля.
3.1. Показатели тягово-скоростных свойств
Основными
показателями, позволяющими оценить
тягово-скоростные свойства автомобиля,
являются:
• максимальная
скорость
![]() ,
,
км/ч;
• минимальная
устойчивая скорость (на высшей передаче)
![]() ,
,
км/ч;
• время
разгона (с места) до максимальной скорости
tр,
с;
• путь
разгона (с места) до максимальной скорости
Sр,
м;
• максимальные
и средние ускорения при разгоне (на
каждой передаче) jmax
и jср,
м/с2;
• максимальный
преодолеваемый подъем на низшей
передаче и при постоянной скорости
imах,
%;
• длина
динамически преодолеваемого подъема
(с разгона) Sj
,м;
• максимальная
сила тяги на крюке (на низшей передаче)
Рс,
Н.
В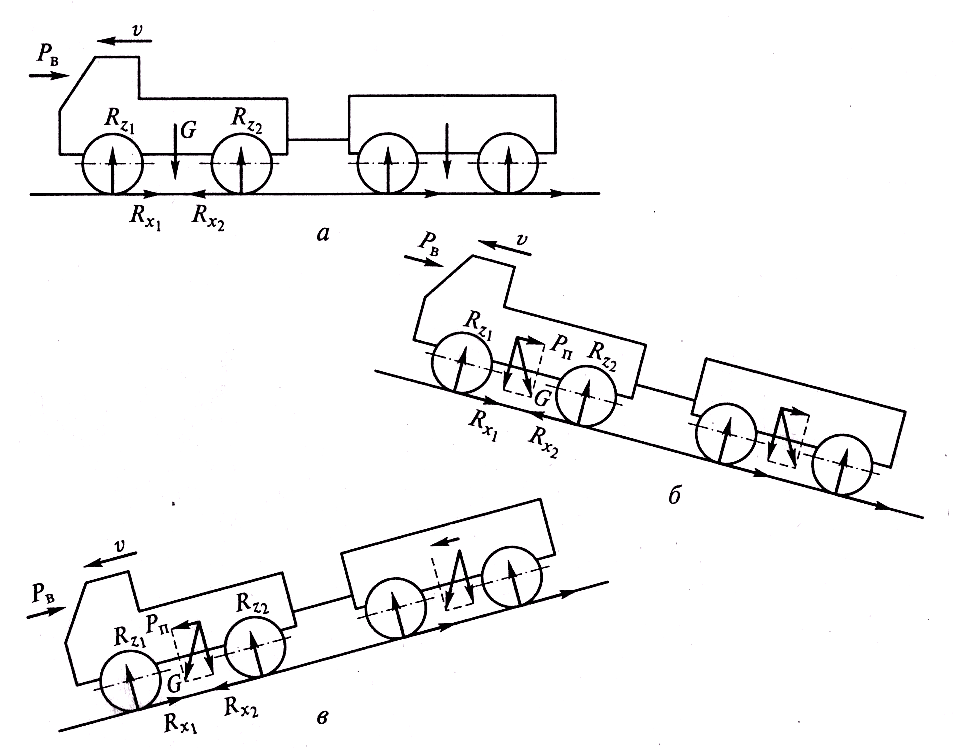 качестве обобщенного оценочного
качестве обобщенного оценочного
показателя тягово-скоростных свойств
автомобиля можно использовать среднюю
скорость непрерывного движения![]() ср,
ср,
км/ч.
Она зависит от условий движения и
определяется с учетом всех его режимов,
каждый из которых характеризуется
соответ-ствующими показателями
тягово-скоростных свойств автомобиля.
3.2. Силы, действующие на автомобиль при движении
При
движении на автомобиль действует целый
ряд сил, которые называются внешними.
К ним относятся (рис. 3.1) сила тяжести
G,
силы
взаимодействия между колесами автомобиля
и дорогой (реакции дороги) RХ1,Rх2
,Rz1,
Rz2
и
сила взаимодействия автомобиля с
воздухом (реакция воздушной среды) Рв.
Рис.
3.1. Силы, действующие на автомобиль с
прицепом при движении: а
— на
горизонтальной дороге; б
— на
подъеме; в
— на
спуске
Одни
из указанных сил действуют в направлении
движения и являются движущими, другие
— против движения и относятся к силам
сопротивления движению. Так, сила RХ2
на
тяговом режиме, когда к ведущим
колесам подводятся мощность и крутящий
момент, направлена в сторону движения,
а силы RХ1
и
Рв
— против движения. Сила Рп
— составляющая силы тяжести — может
быть направлена как в сторону движения,
так и против в зависимости от условий
движения автомобиля — на подъеме или
на спуске (под уклон).
Основной
движущей силой автомобиля является
касательная реакция дороги RХ2
на
ведущих колесах. Она возникает в
результате подвода мощности и
крутящего момента от двигателя через
трансмиссию к ведущим колесам.
3.3. Мощность и момент, подводимые к ведущим колесам автомобиля
В
условиях эксплуатации автомобиль может
двигаться на различных режимах. К
этим режимам относятся установившееся
движение (равномерное), разгон (ускоренное),
торможение(замедленное)
и накат (по инерции). При этом в условиях
накат (по инерции). При этом в условиях
города продолжительность движения
составляет приблизительно 20 % для
установившегося режима, 40 % — для
разгона и 40 % — для торможения и
наката.
При
всех режимах движения, кроме наката и
торможения с отсоединенным двигателем,
к ведущим колесам подводятся мощность
и крутящий момент. Для определения этих
величин рассмотрим схему,
Рис.
3.2. Схема для определения мощности
и крутящего момента, подводимых
от двигателя к ведущим колесам
автомобиля:
Д
— двигатель; М — маховик; Т — трансмиссия;
К — ведущие колеса
представленную
на рис. 3.2. Здесь Ne
— эффективная мощность двигателя; Nтр
— мощность, подводимая к трансмиссии;Nкол—
мощность, подводимая к ведущим колесам;
Jм
— момент инерции маховика (под этой
величиной условно понимают момент
инерции всех вращающихся частей двигателя
и трансмиссии: маховика, деталей
сцепления, коробки передач, карданной
передачи, главной передачи и др.).
При
разгоне автомобиля определенная доля
мощности, передаваемой от двигателя
к трансмиссии, затрачивается на
раскручивание вращающихся частей
двигателя и трансмиссии. Эти затраты
мощности
![]() (3.1)
(3.1)
где
А
— кинетическая
энергия вращающихся частей.
Учтем,
что выражение для кинетической энергии
имеет вид
![]()
Тогда
затраты мощности
![]() (3.2)
(3.2)
Исходя
из уравнений (3.1) и (3.2) мощность, подводимую
к трансмиссии, можно представить в виде
![]()
(3.3)
Часть
этой мощности теряется на преодоление
различных сопротивлений (трения) в
трансмиссии. Указанные потери мощности
оцениваются коэффициентом полезного
действия трансмиссии
![]() тр.
тр.
С учетом потерь
мощности в трансмиссии подводимая к
ведущим колесам мощность
![]() (3.4)
(3.4)
Угловая скорость
коленчатого вала двигателя
![]() (3.5)
(3.5)
где
ωк—угловая
скорость ведущих колес; uт—передаточное
число трансмиссии
Передаточное число
трансмиссии
![]()
Где
uk
— передаточное
число коробки передач; uд
— передаточное число дополнительной
коробки передач (раздаточная коробка,
делитель, демультипликатор); иГ
— передаточное
число главной передачи.
В
результате подстановки
![]() e
e
из
соотношения (3.5) в формулу (3.4) мощность,
подводимая к ведущим колесам:
![]() (3.6)
(3.6)
При
постоянной угловой скорости коленчатого
вала второй член в правой части выражения
(3.6) равен нулю. В этом случае мощность,
подводимая к ведущим колесам, называется
тяговой.
Ее
величина
![]() (3.7)
(3.7)
С учетом соотношения
(3.7) формула (3.6) преобразуется к виду
![]() (3.8)
(3.8)
Для
определения крутящего момента Мк,
подводимого
от двигателя к ведущим колесам, представим
мощности Nкол
и
NT,
в выражении (3.8) в виде произведений
соответствующих моментов на угловые
скорости. В результате такого преобразования
получим
![]() (3.9)
(3.9)
Подставим
в формулу (3.9) выражение (3.5) для угловой
скорости коленчатого вала и, разделив
обе части равенства на
![]() к
к
получим
![]() (3.10)
(3.10)
При
установившемся движении автомобиля
второй член в правой части формулы
(3.10) равен нулю. Момент, подводимый к
ведущим колесам, в этом случае называется
тяговым.
Его
величина

![]() (3.11)
(3.11)
С учетом соотношения
(3.11) момент, подводимый к ведущим колесам:
![]() (3.12)
(3.12)
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Тягово-скоростные свойства автомобиля. Оценочные показатели тягово-скоростных свойств. Тяговый баланс и уравнение движения автомобиля
Страницы работы
Содержание работы
4. Тягово-скоростные свойства автомобиля
4.1. Оценочные
показатели тягово-скоростных свойств
Тягово-скоростные свойства (динамичность)
автомобиля характеризуют его способность перевозить грузы или пассажиров с
высокой средней скоростью и производительностью в заданных дорожных условиях.
Для оценки тягово-скоростных свойств
проектируемого автомобиля используют показатели:
1)
максимальная скорость автомобиля Vmax;
2)
динамический
фактор при максимальной скорости Dv;
3) максимальный динамический фактор на
высшей передаче Dв.max, соответствующие
ему критическая скорость Vкр.в и величина подъема дороги iв.max, который может
преодолеть автомобиль без перехода на пониженную передачу;
4) максимальный динамический фактор на
низшей передаче Dн.max и соответствующая
ему критическая скорость Vкр.н;
5) максимальный продольный уклон
дороги imax, при равномерном
движении автомобиля на подъеме;
6) предельный уклон дороги iпр, который может
преодолеть автомобиль с разгона;
7) динамический фактор по сцеплению Dφ;
 составляющие энергетического
составляющие энергетического
баланса автомобиля и коэффициент использования мощности двигателя при движении
на высшей передаче (ступени);
9) характеристики разгона до заданной Vз или максимальной Vmax скорости движения
автомобиля.
Показатели
определяют в процессе дорожных и стендовых испытаний автомобиля или
моделированием его движения на ЭВМ с использованием динамической
характеристики. Дорожные испытания проводят на горизонтальном участке дороги с
твердым и ровным (асфальто-бетонным) покрытием в сухую погоду. Продольный уклон
дороги не более 0,5 % на участке длиной 50 м, поперечный уклон – не более 3 %.
Температура воздуха 5-30 оС, скорость ветра не более 3 м/с,
атмосферное давление не ниже 91 кПа, относительная влажность воздуха не выше 95
%. Автомобили полной массой свыше 3,5 т должны иметь полную нагрузку, а до 3,5
т – 50 % от полной, но не менее 180 кг.
Стендовые
испытания проводят на специальных стендах, позволяющих имитировать «бегущую
дорогу». Автомобиль при этом не подвижен, а его ведущие колеса взаимодействуют
с вращающимися беговыми барабанами. Стенды позволяют упростить процесс
испытаний и уменьшить затраты на их проведение.
Максимальная
скорость Vmax– это наибольшая
средняя скорость установившегося движения автомобиля на прямолинейном участке
протяженностью 1 км. Ее значение определяют при полной подаче топлива на высшей
(или предшествующей) передаче, обеспечивающей достижение наибольшей устойчивой
скорости движения. Для грузовых автомобилей значение Vmax установлено
Правилами ЕЭК ООН № 68 и ГОСТ 22576-90 и зависит от типа и назначения
автомобиля: для одиночных автомобилей полной массой ma<3,5 т Vmax должно быть не
менее 110 км/ч; полной массой ma≥3,5 т – не менее
95 км/ч; автопоездов не менее 100 км/ч. Для легковых автомобилей Vmax зависит от класса
и составляет: для особо малого класса – до 140 км/ч; малого класса – до 170
км/ч; среднего и большого – до 220 км/ч.
Условная
максимальная скорость Vуmax– это средняя
скорость на последних 400 м участка дороги в 2000 м при разгоне автомобиля с
места. Переключение передач должно производиться при номинальной частоте
вращения коленчатого вала двигателя.
Время разгона на
участках пути 400 и 1000 м фиксируют при разгоне в тех же условиях, в которых
определяется Vmax.
Время разгона до
заданной скорости tv определяется при
тех же условиях. Заданная скорость разгона составляет [1]: для автомобилей всех
типов полной массой до 3,5 т Vз=100 км/ч; для грузовых автомобилей,
автобусов (кроме городских) полной массой свыше 3,5 т и автопоездов Vз=80 км/ч; для
городских автобусов Vз=60 км/ч.
Показатели (2-7)
определяют по динамической характеристике автомобиля. Значения imax нормированы: для
грузовых автомобилей с полной нагрузкой imax≥0,25; для
автопоездов imax≥0,18.
4.2. Тяговый
баланс и уравнение движения автомобиля
Оценка тягово-скоростных свойств
осуществляется в процессе моделирования прямолинейного движения автомобиля на
основе уравнения тягового баланса, отражающего соотношение движущей силы на
ведущих колесах Рк и внешних сил сопротивления
Рк=Рf+Рi+Рw+Рj+Рпр. (4.1)
Тяговое усилие Рк (Н) на
ведущих колесах образуется при передаче крутящего момента двигателя через
трансмиссию и определяется по формуле
![]() (4.2)
(4.2)
Сила сопротивления качению Рf зависит от массы
автомобиля ma=mo+mr и коэффициента
сопротивления качению fv
![]() (4.3)
(4.3)
Сила сопротивления движению на подъем
(спуск) Рi зависит от угла
продольного уклона дороги, который обычно не превышает 5-8 град. Модуль этой
силы вычисляют по формуле
![]() (4.4)
(4.4)
Сила сопротивления воздуха Pw зависит от
лобовой площади автомобиля F=BгНг,
коэффициентов сопротивления воздуха Кw и заполнения
площади ал (3.21), а также скорости движения V
![]() (4.5)
(4.5)
Скорость движения (м/с) определяется по
формуле
![]() . (4.6)
. (4.6)
Похожие материалы
- Тягово-скоростные свойства и топливная экономичность автомобиля с гидромеханической трансмиссией. Особенности гидродинамических передач
- Инженерно-техническое обеспечение. Подготовка тракторов к работе. Установка колес и давление воздуха в шинах тракторов «Кировец» на основных операциях
- Вивчення моделюючої програми NetCracker Pro. Відображення основних складових частин головного вікна. Виклик панелі компонентів
Информация о работе
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание — внизу страницы.
Лекция 1. Тягово-скоростные свойства
автомобилей
Тягово-скоростными свойствами называют совокупность свойств, определяющих возможные по характеристикам двигателя или сцепления ведущих колес с дорогой диапазоны изменения скоростей движения и предельные интенсивности разгона автомобиля при его работе на тяговом режиме в различных дорожных условиях. Тяговым принято считать режим, при котором от двигателя к ведущим колесам подводится мощность, достаточная для преодоления сопротивления движению.
Выполняй транспортную работу, водитель выбирает скорость движения, исходя из эксплуатационных условий. Этот выбор ограничен диапазоном скоростей от максимальной, определяемой максимальной мощностью двигателя или сцеплением ведущих колес с дорогой, до минимальной по условиям устойчивой работы двигателя. Чем тяжелее дорожные условия, тем более узок этот диапазон и меньше возможные ускорения. В некоторых условиях диапазон снижается до единственно возможного значения скорости — такие дорожные условия являются предельными. В более тяжелых дорожных условиях движение невозможно.
Методы оценки тягово-скоростных свойств могут быть использованы для решения двух задач: анализа — определения скоростей, ускорений и предельных дорожных условий, в которых возможно движение автомобиля с заданными конструктивными параметрами, и синтеза — определения конструктивных параметров, которые могут обеспечить заданные значения скоростей и ускорений в заданных дорожных условиях движения, а также нахождения предельных дорожных условий. Решение первой задачи называют поверочным тяговым, расчетом, а второй — проектировочным тяговым расчетом.
Возможно также сравнение автомобилей по показателям тягово-скоростных свойств и оценка их технического уровня и качества по степени соответствия нормируемым или рекомендуемым значениям этих показателей.
1.1 Оценочные параметры
Наиболее употребительные и достаточными для сравнительной оценки являются следующие параметры:
1) Vamax — максимальная скорость движения автомобиля;
2) tvp – время разгона до заданной скорости;
3) tsp – время разгона на заданном пути;
4) скоростная характеристика «разгон-выбег»;
tp, Sp – время и путь разгона а/м;
tв, Sв – время и путь выбега а/м;
tп – время переключения передач;
Sп – путь, проходимый за время переключения передач;
Vп – падение скорости за время переключения передач.
5) характеристика разгона на высшей передаче;
6) Рт – тяговая сила на крюке;
7) Д – динамический фактор;
ja – величина ускорения при разгоне;
9) Рт.кр – сила тяги на крюке.
1.2 Силы и моменты, действующие на автомобиль
На автомобиль действуют три группы сил:
1) Сила тяжести;
2) Силы, вызывающие движение;
3) Силы, препятствующие движению.
При рассмотрении сил и моментов, действующих на автомобиль принимаются ряд допущений:
1) Автомобиль приводится к плоской схеме;
2) Исключается упругая связь, подвеска и автомобиль представляются жесткой системой, совершающей движение без колебаний.
3) Автомобиль представляется, как система с сосредоточенными массами и линейными характеристиками.
1.2.1 Силы тяжести
ma – полная масса автомобиля, кг;
g – ускорение свободного падения, м/с2;
mag – сила тяжести, Н;
Rz1, Rz2 – нормальные реакции в контакте передних и задних колес, Н;
а, в – расстояния от осей автомобиля до ц.м., м;
hц – высота центра масс, м;
О1, О2 – центры пятен контактов колес.
Σ Мо1 = 0,
,
Σ Мо2 = 0,
,
1.2.2 Силы и моменты, вызывающие движение
1 – ДВС; 2 – сцепление; 3 – КПП; 4 – карданный вал;
5 – главная передача; 6 – дифференциал; 7 — полуось
Сила, вызывающая движение называется тяговая сила (РТ), подводимая к ведущим колесам.
Моментом, вызывающим движение называется тяговый момент (МТ), подводимый к ведущим колесам.
Кроме этого при рассмотрении движения автомобиль используют понятие «тяговой мощности» (NТ).
Ne – эффективная мощность двигателя;
Me – эффективный крутящий момент двигателя.
NТ – мощность затрачиваемая на преодоление трения в трансмиссии.
КПД трансмиссии:
КПД трансмиссии характеризует затраты мощности на преодоление трения в трансмиссии автомобиля.
Мощность, подводимая к ведущим колесам, при равномерном движении автомобиля:
Тяговый момент, подводимый к ведущим колесам, при равномерном движении:
(4х2, 6х4)
где Uо – передаточное число главной передачи;
Uкп – передаточное число коробки передач.
(4х4, 6х6)
где Uдк – передаточное число дополнительной коробки.
Передаточное число трансмиссии:
(4х4, 6х6)
(4х2, 6х4)
rд – динамический радиус колеса, м.
Формулы, выше приведенные для расчета NТ, МТ, РТ справедливы для равномерного движения, т.е. jа = 0.
Практическая эксплуатация автомобиля показывает, что равномерный режим движения составляет 40…60% от общего движения.
Если автомобиль движется с ускорением, то мощность, подводимая к ведущим колесам, определяется по формуле:
где IM – осевой момент инерции маховика;
M — угловая скорость вращения маховика двигателя;
dM/dt = M – угловое ускорение маховика коленчатого вала;
— мощность, затрачиваемая на развитие углового ускорения вращающихся частей двигателя.
где К — угловая скорость колес.
где — момент, затрачиваемый на раскручивание.
1.2.3 Силы, препятствующие движению
Рк1, Рк2 – силы сопротивления качению передних и задних колес;
Рв – сила сопротивления воздуха;
Ри – сила инерции;
Рп – сила сопротивления подъема.
и
1.3 Силы сопротивления качению
1.3.1 Кинематика и динамика автомобильного
колеса
1.3.1.1 Кинематика
Кинематика автомобильного колеса оценивается следующими параметрами:
1) Радиус колеса;
2) Скорость колеса;
3) Ускорение колеса.
Радиус колеса
Различают следующие виды радиусов:
1) r0 – свободный радиус колеса (расстояние от центра, ненагруженного норм. нагрузкой, неподвижного колеса до опорной поверхности)
2) rст – статический радиус колеса (расстояние от центра, нагруженного норм. нагрузкой, неподвижного колеса до опорной поверхности)
3) rд – динамический радиус колеса (расстояние от центра, нагруженного норм. нагрузкой, подвижного колеса до опорной поверхности)
4) rкин – кинематический радиус.
где Vк – линейная скорость качения колеса;
к – угловая скорость колеса.
Скорость колеса
где к – угловая скорость колеса.
Передаточное отношение трансмиссии:
,
где nе – частота вращения коленвала, об/мин.
где Vк – скорость колеса, км/ч;
rд – радиус динамический, м;
ne – частота вращения коленвала, об/мин.
Так как каждая точка колеса перемещается в продольном направлении со скоростью Vк, а каждая точка принадлежит как колесу, так и автомобилю, то выше приведенные формулы справедливы для определения скорости движения автомобиля.
Ускорение колеса
,
.
1.3.1.2 Динамика автомобильного колеса
Pz – нормальная сила;
Rz – результирующая норм. реакций.
При неподвижном колесе RZ направлена по линии действия Pz.
Если колесо нагрузить ступенчато нормальной нагрузкой и для каждой нагрузки фиксировать деформацию шин, а затем также ступенчато разгрузить шину и фиксировать величину деформации, то получим упругую характеристику колеса.
Площадь между линиями нагрузки и разгрузки характеризует необратимые потери энергии в шине (гистерезиса).
Необратимые потери энергии обусловлены следующим:
1) при деформации шин за счет межмолекулярного трения происходит нагрев шин и полученное тепло отдается в окружающую среду;
2) чем меньше давление воздуха в шине, тем больше площадь между линиями нагрузки и разгрузки, следовательно больше величина необратимых потерь.
1.4 Характеристика, определяющая
тягово-скоростные свойства автомобиля
Характеристикой, определяющей ТСС, является внешне-скоростная характеристика двигателя (ВСХ).
ВСХ – зависимость эффективной мощности, эффективного крутящего момента и удельного эффективного расхода топлива от частоты вращения коленчатого вала.
nmin, nmax – минимально и максимально устойчивая частота вращения коленвала;
nМ – частота вращения при максим. моменте;
nN – частота вращения при максим. мощности;
nд – частота вращения при миним. расходе топлива.
Тягово-скоростные свойства зависят от эффект. мощности и эффективного момента, будем рассматривать следующее: .
А зависимость расхода топлива от частоты вращения, характеризующая топливную экономичность двигателя будем рассматривать при оценке топливной экономичности двигателя.
Диапазон nM…nN характеризует устойчивую работу двигателя, т.к. в этом диапазоне изменение частоты вращения приводит к увеличению или эффективной мощности или эффективного момента, что обеспечивает устойчивость работы.
ВСХ можно определить экспериментальным и расчетным методами.
ВСХ эксперим. методом определяется в соответствии с ГОСТом 14846-81 «Двигатели автомобильные. Методы испытания».
Для определения ВСХ расчетным методом используется формула Лейдермана:
где Nei – текущее значение мощности, соответствующее частоте вращения nei;
Nemax – максимальная эффективная мощность;
a, b, c – постоянные коэффициенты.
Алгоритм определения ВСХ
1) Из справочника или паспортный данных выбирается Nemax и nN;
2) Определяется диапазон частоты вращения коленвала;
Для автомобилей без ограничителя числа оборотов:
nmin=(0,1…0,2) nN, nmax=(1,1…1,2) nN
Для автомобилей с ограничителя числа оборотов:
nmin=(0,1…0,2) nN, nmax= nN
3) Полученный диапазон частоты вращения коленвала разбивается на 5-10 равных интервалов;
4) По формуле Лейдермана определяется Ne для каждого интервала;
5) Для каждого интервала определяется Me;
6) Строится ВСХ.
1.5 Уравнение силового и мощностного баланса и
методы их решения
Уравнение силового баланса:
Уравнение силового баланса при равномерном движении:
Наиболее наглядно решение уравнения силового баланса можно представить графическим методом, т.е. строится ТСХ.
Уравнение мощностного баланса:
Уравнение мощностного баланса при равномерном движении:
Для решения уравнения мощностного баланса используют графический метод, т.е. строится диаграмма мощностного баланса.
1.6 Динамический фактор и динамическая
характеристика
Д показывает сколько свободной тяговой силы приходится на единицу силы тяжести.
Для равномерного движения:
Динамическая характеристика:
Д=f(Va)
Условие движения автомобиля по динамическому фактору:
1.7 Ускорение, время и путь разгона автомобиля
Ускорение автомобиля:
Диаграмма ускорения:
ja=f(Va)
jн1 – ускорение начальное в 1 интервале;
jк1 – ускорение в конце 1 интервала;
jн2 – ускорение начальное во 2 интервале;
Vн1 – скорость в начале 1 интервала;
Vк1 – скорость в конце 1 интервала;
Vн2 – скорость в начале 2 интервала;
Для определения пути и времени разгона используется графоаналитический метод. Для этого диаграмму ускорений разбивают (каждую кривую на 5-10) и принимают следующие допущения:
1) в каждом интервале автомобиль движется с постоянной средней скоростью;
2) в каждом интервале автомобиль движется с постоянным средним ускорением.
I интервал
Время разгона на n-ом интервале:
Время разгона на 1 передаче:
Путь разгона на n-ом интервале:
Путь разгона на 1 передаче:
tn – время переключения передач;
Vn – падение скорости за время переключения передич;
Sn – путь, проходимый за время переключения передач.
Время переключения передач составляет: tn =0,5…3 с.
Библиографическое описание:
Анализ тягово-скоростных характеристик двигателя автомобилей / Е. В. Волков, А. А. Привалов, В. В. Сысоев [и др.]. — Текст : непосредственный // Молодой ученый. — 2019. — № 43 (281). — С. 14-16. — URL: https://moluch.ru/archive/281/63422/ (дата обращения: 19.12.2023).
Статья посвящена анализу и повышению тягово-скоростных характеристик двигателя и автомобиля в целом.
Ключевые слова: тягово-скоростные качества, двигатель, крутящий момент, мощность, динамика, ускорение.
Тягово-скоростные качества автомобиля характеризуют его способность доставлять грузы или пассажиров с максимально возможной средней скоростью в данных дорожных условиях. Обычно чем выше тягово-скоростные качества автомобиля, тем меньше время, затрачиваемое на перевозку и, следовательно, тем больше его производительность.
Тягово-скоростные качества автомобиля оцениваются несколькими показателями, которые определяются экспериментальным путем испытаний автомобиля в определенных дорожных условиях или получаются расчетным путем. При расчете тягово-скоростных качеств, задавшись исходными данными, строят ряд графиков, по которым затем определяют показатели тягово-скоростных качеств. Исходными данными для построения графиков являются конструктивные параметры и параметры, характеризующие условия движения. [2, 3]
Тягово-скоростные качества автомобиля включают в себя следующие величины: динамика, мощность, крутящий момент и ускорение.
Крутящий момент двигателя — это качественный показатель, характеризующий силу вращения коленчатого вала. Этот параметр рассчитывается как произведение силы, приложенной к поршню, на плечо (расстояние от центральной оси вращения коленчатого вала до места крепления поршня (шатунной шейки)). Крутящий момент измеряется в ньютонах на метр (Нм). [7, 1]
На практике крутящий момент на валу двигателя приближенно можно измерять обычным ваттметром при одновременном измерении частоты вращения. Крутящий момент однозначно определяется мощностью и частотой вращения из известных зависимостей. Однако здесь следует иметь ввиду, что, измеряя ток и напряжение, определяющие мощность, мы определяем не фактическую мощность на валу двигателя, а его электрическую мощность, которую можно перевести в механическую только при условии, что достаточно точно известна электромеханическая характеристика двигателя. Это не всегда возможно, поэтому такой способ измерения используется только в том случае, когда передаваемый (или потребляемый приводимым двигателем объектом) крутящий момент не является предметом исследования.
В том случае, если крутящий момент необходимо измерять достаточно точно, применяются в основном два способа: измерение с помощью так называемых мотор-весов и измерение с помощью тензометрических датчиков крутящего момента. [7]
Динамика автомобиля — это отношение избыточной силы тяги к полной массе автомобиля, или, иначе, удельная остаточная сила тяги. [9]
Динамику разгона определяют во время специальных тестов. Обычно испытание на скорость разгона проходит на специальной динамометрической автодороге. Во время этого испытания тестируемый автомобиль проезжает определенную дистанцию, разгоняясь до 100 км/час. Сначала движение осуществляется в одну сторону, затем в другую. Показателями динамических свойств автомобиля при неравномерном движении служат величины ускорений, а также путь и время, необходимое для движения в определённом интервале изменения скорости.
Установка более короткого редуктора, за счет сближения передаточных чисел на ведомых валах и увеличения их на главной передаче, позволяет снизить энергозатраты при выходе двигателя на максимальные обороты и тем самым повышает его мощность. Динамические качества автомобиля резко увеличиваются, а вот максимальная скорость снижается или достигается за счёт больших оборотов. [8]
Ускорение автомобиля при разгоне (приемистость) характеризует его способность быстро трогаться с места и увеличивать скорость движения.
Ускорение автомобиля определяют экспериментально во время дорожных испытаний при соблюдении условий, установленных гостами, или рассчитывают применительно к горизонтальной дороге с твёрдым покрытием хорошего качества при условии максимального использования мощности двигателя и отсутствии буксования колёс. [9]
Мощность характеризуется как показатель вырабатываемой двигателем работы в единицу времени. Мощность двигателя можно определить, подключив двигатель автомобиля к специальному динамометру. Динамометр создаёт нагрузку на двигатель и измеряет количество энергии, которое может развить двигатель против нагрузки.
Одним из самых простых и достаточно эффективных способов увеличения мощности автомобиля является увеличение объема мотора путем растачивания диаметра каждого цилиндра на определенное расстояние, тем самым повышая объем в каждом цилиндре и во всем агрегате в целом.
Еще одним из тех способов, который не только увеличивает мощность и крутящий момент двигателя во всем диапазоне, но также и уменьшает расход топлива автомобиля является увеличение степени сжатия поршнем газо-воздушной смеси.
Одним из способов повышения тягово-скоростных свойств автомобиля является применение форсажных режимов работы двигателя и снижение времени переключения передач.
Устройство включения и выключения форсажного режима (рис. 1) представляет собой управляемый упор рейки 1, положение которого определяется, включением или выключением электромагнита 9, так как упор рейки жестко соединен со штоком электромагнита. Электромагнит, в зависимости от наличия тока в катушке, находится в одном из двух крайних положений: верхнем или нижнем. В верхнем положении — форсажный режим выключен, в нижнем — включен. Когда упор находится в нижнем положении, и нет тока в электромагните, то возвратная пружина 5 передвигает упор в верхнее положение. Величина тока в электромагните зависит от величины напряжения в генераторе 12, положения выключателя 13, положения реле включения и выключения форсажного режима 11. Включателем 13 управляет водитель. Возможность и момент выключения форсажного режима зависят от температуры охлаждающей жидкости (ОЖ) в системе охлаждения. При достижении предельной температуры ОЖ сопротивление терморезистора снижается, загорается сигнализатор аварийной температуры ОЖ и выключается реле 11, которое отключает электромагнит и возвратная пружина передвигает упор в нижнее положение — форсажный режим выключен. [5]
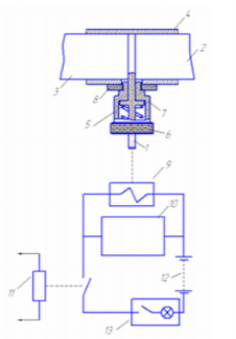
Рис. 1. Устройство включения и выключения форсажного режима
Для реализации форсажного режима двигателя целесообразно внести изменения в трансмиссию автомобиля. Применение коробки передач с изменяемым межосевым расстоянием позволяет сократить время разрыва потока мощности. Снижение времени переключения и возможность переключения передач водителем на ходу автомобиля без выключения сцепления — приведет к улучшению тягово-скоростных свойств автомобиля. Время переключения в коробках передач во многом зависит от применяемой конструктивной схемы. Коробка передач с изменяемым межосевым расстоянием [2, 3] позволяет производить переключение передач за малый промежуток времени (до 0.1 с). По сравнению с широко применяемыми в настоящее время механическими коробками передач, у которых время переключения составляет 1…2 с, это может существенно повысить динамику разгона автомобиля.
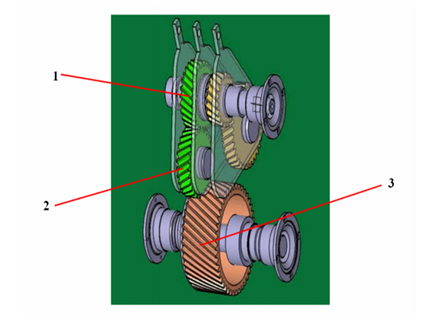
Рис. 2. Схема силового модуля для иллюстрации принципа переключения передач [4]
Литература:
- Расчёт тягово-динамических и топливно-экономических показателей автомобиля [Электронный ресурс]: методические указания / Н. В. Хольшев, Д. Н. Коновалов. — Тамбов: Изд-во ФГБОУ ВО «ТГТУ», 2017
- Кравец В. Н., Определение тягово-скоростных свойств автомобиля. — Горький: ГПИ, 1983, 42с.
- https://knowledge.allbest.ru/transport/html
- https://www.drive2.ru
- http://mospolytech.ru/science/aai77/scientific/article/s01/s01_08.pdf
- https://avtonam.ru/useful/krutyashhij-moment-dvigatelya/
- https://helpiks.org/7–88193.html
- https://drivertip.ru/osnovy/kak-uluchshit-dinamiku-avtomobilya.html
- https://sci-lib.biz/logistika/chast-opredelenie-puti-vremeni-razgona-37295.html
Основные термины (генерируются автоматически): крутящий момент, форсажный режим, тягово-скоростное качество автомобиля, коробок передач, верхнее положение, возвратная пружина, изменяемое межосевое расстояние, коленчатый вал, нижнее положение, тягово-скоростное свойство автомобиля.