From Wikipedia, the free encyclopedia
Directional stability is stability of a moving body or vehicle about an axis which is perpendicular to its direction of motion. Stability of a vehicle concerns itself with the tendency of a vehicle to return to its original direction in relation to the oncoming medium (water, air, road surface, etc.) when disturbed (rotated) away from that original direction. If a vehicle is directionally stable, a restoring moment is produced which is in a direction opposite to the rotational disturbance. This «pushes» the vehicle (in rotation) so as to return it to the original orientation, thus tending to keep the vehicle oriented in the original direction.
Directional stability is frequently called «weather vaning» because a directionally stable vehicle free to rotate about its center of mass is similar to a weather vane rotating about its (vertical) pivot.
With the exception of spacecraft, vehicles generally have a recognisable front and rear and are designed so that the front points more or less in the direction of motion. Without this stability, they may tumble end over end, spin or orient themselves at a high angle of attack, even broadside on to the direction of motion. At high angles of attack, drag forces may become excessive, the vehicle may be impossible to control, or may even experience structural failure. In general, land, sea, air and underwater vehicles are designed to have a natural tendency to point in the direction of motion.
Example: road vehicle[edit]
Arrows, darts, rockets, and airships have tail surfaces (fins or feathers) to achieve directional stability; an airplane uses its vertical stabilizer for the same purpose. A road vehicle does not have elements specifically designed to maintain stability, but relies primarily on the distribution of mass.
Introduction[edit]
These points are best illustrated with an example. The first stage of studying the stability of a road vehicle is the derivation of a reasonable approximation to the equations of motion.

The diagram illustrates a four-wheel vehicle, in which the front axle is located a distance  ahead of the centre of gravity and the rear axle is a distance
ahead of the centre of gravity and the rear axle is a distance  aft of the cg. The body of the car is pointing in a direction
aft of the cg. The body of the car is pointing in a direction  (theta) whilst it is travelling in a direction
(theta) whilst it is travelling in a direction  (psi). In general, these are not the same. The tyre treads at the region of contact point in the direction of travel, but the hubs are aligned with the vehicle body, with the steering held central. The tyres distort as they rotate to accommodate this mis-alignment, and generate side forces as a consequence.
(psi). In general, these are not the same. The tyre treads at the region of contact point in the direction of travel, but the hubs are aligned with the vehicle body, with the steering held central. The tyres distort as they rotate to accommodate this mis-alignment, and generate side forces as a consequence.
The net side force Y on the vehicle is the centripetal force causing the vehicle to change the direction it is traveling:

where M is the vehicle mass and V the speed.
The angles are all assumed small, so the lateral force equation is:

The rotation of the body subjected to a yawing moment N is governed by:

where I is the moment of inertia in yaw.
The forces and moments of interest arise from the distortion of the tyres. The angle between the direction the tread is rolling and the hub is called the slip angle. This is a bit of a misnomer, because the tyre as a whole does not actually slip, part of the region in contact with the road adheres, and part of the region slips. We assume that the tyre force is directly proportional to the slip angle ( ). This is made up of the slip of the vehicle as a whole modified by the angular velocity of the body. For the front axle:
). This is made up of the slip of the vehicle as a whole modified by the angular velocity of the body. For the front axle:

whilst for the rear axle:

Let the constant of proportionality be k. The sideforce is, therefore:

The moment is:

Denoting the angular velocity  , the equations of motion are:
, the equations of motion are:



Let  (beta), the slip angle for the vehicle as a whole:
(beta), the slip angle for the vehicle as a whole:


Eliminating yields the following equation in  :
:

This is called a second-order linear homogeneous equation, and its properties form the basis of much of control theory.
Stability analysis[edit]
We do not need to solve the equation of motion explicitly to decide whether the solution diverges indefinitely or converges to zero following an initial perturbation. The form of the solution depends on the signs of the coefficients.
The coefficient of  will be called the ‘damping’ by analogy with a mass-spring-damper which has a similar equation of motion.
will be called the ‘damping’ by analogy with a mass-spring-damper which has a similar equation of motion.
By the same analogy, the coefficient of will be called the ‘stiffness’, as its function is to return the system to zero deflection, in the same manner as a spring.
The form of the solution depends only on the signs of the damping and stiffness terms. The four possible solution types are presented in the figure.
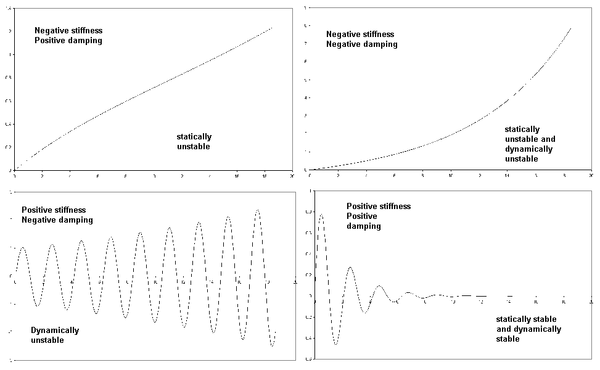
The only satisfactory solution requires both stiffness and damping to be positive.
The damping term is:

The tyre slip coefficient k is positive, as are the mass, moment of inertia and speed, so the damping is positive, and the directional motion should be dynamically stable.
The stiffness term is:

If the centre of gravity is ahead of the centre of the wheelbase ( , this will always be positive, and the vehicle will be stable at all speeds. However, if it lies further aft, the term has the potential of becoming negative above a speed given by:
, this will always be positive, and the vehicle will be stable at all speeds. However, if it lies further aft, the term has the potential of becoming negative above a speed given by:

Above this speed, the vehicle will be directionally unstable.
Relative effect of front and rear tyres[edit]
If for some reason (incorrect inflation pressure, worn tread) the tyres on one axle are incapable of generating significant lateral force, the stability will obviously be affected.
Assume to begin with that the rear tyres are faulty, what is the effect on stability?
If the rear tyres produce no significant forces, the side force and yawing moment become:


The equation of motion becomes:

The coefficient of is negative, so the vehicle will be unstable.
Now consider the effect of faulty tyres at the front. The Side force and yawing moment become:


The equation of motion becomes:

The coefficient of is positive, so the vehicle will be stable but unsteerable.
It follows that the condition of the rear tyres is more critical to directional stability than the state of the front tyres. Also, locking the rear wheels by applying the handbrake, renders the vehicle directionally unstable, causing it to spin. Since the vehicle is not under control during the spin, the ‘handbrake turn’ is usually illegal on public roads.
Steering forces[edit]
Deflecting the steering changes the slip angle of the front tyres, generating a sideforce. With conventional steering, the tyres are deflected by different amounts, but for the purposes of this analysis, the additional slip will be considered equal for both front tyres.
The side force becomes:

where  (eta) is the steering deflection. Similarly, the yawing moment becomes:
(eta) is the steering deflection. Similarly, the yawing moment becomes:

Including the steering term introduces a forced response:

The steady state response is with all time derivatives set to zero. Stability requires that the coefficient of must be positive, so the sign of the response is determined by the coefficient of :

This is a function of speed. When the speed is low, the slip is negative and the body points out of the corner (it understeers). At a speed given by:

The body points in the direction of motion. Above this speed, the body points into the corner (oversteers).
As an example:
-
- with k=10kN/radian, M=1000kg, b=1.0m, a=1.0m, the vehicle understeers below 11.3mph.
Evidently moving the centre of gravity forwards increases this speed, giving the vehicle a tendency to understeer.
Note: Installing a heavy, powerful engine in a light weight production vehicle designed around a small engine increases both its directional stability, and its tendency to understeer. The result is an overpowered vehicle with poor cornering performance.
Even worse is the installation of an oversized power unit into a rear engined production vehicle without corresponding modification of suspension or mass distribution, as the result will be directionally unstable at high speed.
Limitations of the analysis[edit]
The forces arising from slip depend on the loading on the tyre as well as the slip angle, this effect has been ignored, but could be taken into account by assuming different values of k for the front and rear axles. Roll motion due to cornering will redistribute the tyre loads between the nearside and offside of the vehicle, again modifying the tyre forces. Engine torque likewise re-distributes the load between front and rear tyres.
A full analysis should also take account of the suspension response.
The complete analysis is essential for the design of high performance road vehicles, but is beyond the scope of this article.
Aviation[edit]

Directional Stability about the aircraft’s vertical axis is also referred to as yawing. This is primarily achieved by the area of the vertical stabilizer and the sides of the fuselage aft of the center of gravity. When an airplane is flying in a straight line while hit by a side gust of wind, the left/right yawing motion will be stopped by the air striking at the right/left side of the vertical stabilizer.[1]
References[edit]
- Barwell F T : Automation and Control in Transport, Pergamon Press, 1972.
- Synge J L and B A Griffiths : Principles of Mechanics, Section 6.3, McGraw-Hill Kogakusha Ltd,3rd Edition, 1970.
- ^ «Pilot’s Handbook of Aeronautical Knowledge». Federal Aviation Administration. August 24, 2016. p. 5-19. Retrieved 16 January 2023.
See also[edit]
- Relaxed stability
- Car handling
- Flight dynamics
- Dutch roll
- Longitudinal stability
- Hunting oscillation
External links[edit]
 Media related to Directional stability at Wikimedia Commons
Media related to Directional stability at Wikimedia Commons

Современные автомобили оснащаются разнообразными вспомогательными системами, которые делают поездки более комфортными и безопасными. Многие из них уже стали обязательными во многих странах мира, например, система курсовой устойчивости (или система динамической стабилизации), о которой вы узнаете в этой статье.
Что такое система курсовой устойчивости (динамической стабилизации)
Система курсовой устойчивости — активная система безопасности, которая служит, главным образом, для предотвращения заносов во время движения автомобиля. Работа системы обеспечивает курсовую устойчивость автомобиля во время маневров, предотвращая возникновение бокового скольжения и срыва в занос.
Данная система может носить различные названия, которые отражают ее назначение: система курсовой устойчивости (система поддержки курсовой устойчивости), система динамической стабилизации (речь идет о поперечной динамике автомобиля), электронный контроль устойчивости, а также просто противозаносная система.
Впервые о системе, которая могла бы контролировать курсовую устойчивость автомобиля, конструкторы задумались еще в середине прошлого века, и уже в 1959 году компания Daimler-Benz получила патент на изобретение автоматического управляющего устройства. Однако в то время система не могла быть реализована по причине отсутствия доступных и эффективных технологий. Такая возможность появилась лишь в конце 80-х — начале 90-х годов прошлого века, в это время различные автопроизводители предлагали свои варианты системы, но ни одна из них не получила широкого распространения.
Первая эффективная система курсовой устойчивости появилась в 1995 году, это была совместная разработка Mercedes-Benz и Bosch. Она получила название «ESP» (Elektronisches Stabilitatsprogramm), и устанавливалась на новые автомобили Mercedes-Benz A-class. Через несколько лет система (и подобные ей системы от других производителей) стали активно использоваться во многих автомобилях.
Система курсовой устойчивости показала свою высокую эффективность, она даже была признана одним из самых важных изобретений, которое многократно повысило безопасность автомобилей. В период 2010-2011 года данная система стала обязательной для всех новых пассажирских автомобилей в Израиле, Австралии, Канаде, странах Евросоюза и в США (только для пассажирских автомобилей массой до 4536 кг).
В России законодательной нормы по наличию в автомобиле системы курсовой устойчивости нет, и данная система чаще предлагается в виде опции. Сегодня существует возможность установить ESP практически на любой автомобиль, однако эта опция не пользуется большой популярностью, хотя причина тому не столько цена, сколько отсутствие информировании о пользе системы и, как следствие, отсутствие интереса со стороны потребителя. С этой точки зрения интересен опыт Швеции, в которой проводится широкая кампания по социальной рекламе системы курсовой устойчивости и других активных систем безопасности автомобиля. Но в России ничего подобного нет, и в обозримом будущем вряд ли будет.
Устройство системы
Систему курсовой устойчивости нельзя рассматривать, как отдельную систему автомобиля — скорее, это система более высокого уровня, которая состоит сразу из нескольких активных систем:
— Антиблокировочная система тормозов (ABS);
— Электронная блокировка дифференциала (EDS);
— Система распределения тормозных усилий (EBD);
— Антипробуксовочная система (ASR);
— Система управления двигателем.
У системы курсовой устойчивости мало собственных компонентов, так как она активно использует компоненты указанных выше систем. Таким образом, ESP значительно расширяет функции других систем, использует их потенциал и значительно снижает вероятность возникновения аварийных ситуаций.
В состав системы курсовой устойчивости входит несколько основных компонентов:
— Входные датчики;
— Электронный блок управления (контроллер);
— Исполнительное устройство.
Входные датчики. В системе используется довольно большое количество датчиков, которые позволяют получить максимальное количество информации о текущем состоянии автомобиля:
— Датчик угла поворота руля;
— Датчик скорости вращения колес (используются датчики, входящие в состав антиблокировочной системы);
— Датчик давления в тормозной системе;
— Датчики продольного и поперечного ускорения (G-сенсоры, датчики перегрузок).
Кроме того, контроллер системы получает информацию с блоков управления двигателем и коробки передач (только в случае автоматической или роботизированной трансмиссии).
Электронный блок управления (контроллер). Информация со всех датчиков поступает в электронный блок управления, который создает текущую картину движения автомобиля. Также в контроллере заложены программы, в которых прописаны безаварийные параметры движения автомобиля. Именно на сравнении «теоретических» параметров (заложенных в программе) и фактических (получаемых на основе информации с датчиков) и поострена работа системы курсовой устойчивости.
Исполнительные устройства. У системы ESP нет собственных исполнительных устройств, в их качестве выступают компоненты других систем безопасности:
— Гидромодуляторы системы ABS (с их помощью осуществляется торможение колес);
— Клапаны (высокого давления и переключающие) антипробуксовочной системы;
— Сигнальные лампы тормозной системы и системы ABS, также на приборной панели часто присутствуют собственные сигнальные лампы системы курсовой устойчивости.
Именно тот факт, что система ESP широко использует компоненты других систем, и позволяет устанавливать ее на автомобили с минимальными затратами, поэтому цена безопасности оказывается невысокой.
Принцип работы системы
Работа системы курсовой устойчивости не отличается сложностью и в общем случае сводится к следующему:
— Входные датчики дают всю информацию о фактическом положении и характере движения автомобиля;
— Данная информация сравнивается с программой, заложенной в контроллере;
— При отличии фактического положения дел от программы контроллер включает исполнительные устройства, предотвращая аварийную ситуацию.
Здесь возникает вопрос — а как в блок управления можно заложить все возможные программы движения автомобиля, и как на их основе определяется возникновение аварийной ситуации? На самом деле все довольно просто — в основу работы системы заложены простые физические законы. Например, траектория автомобиля при повороте зависит от радиуса поворота, скорости и массы автомобиля (здесь также имеет значение сцепление колес и дорожного покрытия), и эта траектория будет одна (с некоторыми отклонениями в ту или иную сторону). Также при нормальном движении автомобиль испытывает определенные продольные и поперечные ускорения, которые зависят от скорости и радиуса поворота, и их отклонение от допустимых значений говорят о возникновении заноса.
Именно эти принципы заложены в те модели неаварийного движения автомобиля, которые в виде программ заложены в контроллер. Любое недопустимое отклонение фактического состояния автомобиля от программы идентифицируется контроллером, как возникновение неконтролируемой водителем аварийной ситуации, и в этом случае автоматика предпринимает действия к предотвращению заноса.
Современные системы курсовой устойчивости обладают высоким быстродействием — обычно между возникновением аварийной ситуации и срабатыванием исполняющих механизмов проходит не более 20 миллисекунд (0,02 секунды). Это значительно превышает скорость реакции водителя (в лучшем случае, водитель реагирует на опасность через 0,4 секунды, но обычно это время составляет порядка одной секунды), и в большинстве случаев более чем достаточно для предотвращения аварии.
Для предотвращения аварийной ситуации система курсовой устойчивости может предпринимать различные действия:
— Подтормаживание одного или нескольких колес (в зависимости от траектории и скорости автомобиля, направления заноса и т.д.);
— Изменение крутящего момента, передаваемого на колеса (посредством изменения крутящего момента двигателя или переключением скоростей).
Если в автомобиле предусмотрена система активного рулевого управления, то ESP может подавать сигнал на изменение угла поворота передних колес. А если автомобиль оборудован адаптивной подвеской, то в ряде случаев системой курсовой устойчивости может использоваться и она (обычно изменяется степень демпфирования амортизаторов).
Система курсовой устойчивости работает постоянно, она контролирует поведение автомобиля при разгоне и торможении, на любых скоростях и во всех режимах. Но обычно она не дает о себе знать, и нередко водители, сорвавшись в занос, с удивлением узнают, что их машина оборудована ESP.
Наиболее распространенные типы системы курсовой устойчивости
На сегодняшний день все системы курсовой устойчивости построены на одинаковых принципах, поэтому о каких-то особых типах ESP говорить нельзя. Но эти системы на разных автомобилях встречаются под различными названиями, которыми их наделил производитель. Всего существует свыше полутора десятков систем:
— ASC (Active Stability Control) и ASTC (Active Skid and Traction Control MULTIMODE) — на автомобилях BMW и Mitsubishi;
— AdvanceTrac — на автомобилях Lincoln иMercury;
— CST (Controllo Stabilita ) — на автомобилях Ferrari;
— DSC (Dynamic Stability Control) — на автомобилях BMW, Ford (только в Австралии), Jaguar, Land Rover, Mazda и MINI;
— DSTC (Dynamic Stability and Traction Control) — на автомобилях Volvo;
— ESC (Electronic Stability Control) на автомобилях Chevrolet, Hyundai, Kia, SKODA, а также на многих отечественных моделях LADA;
— ESP (Elektronisches Stabilitatsprogramm) — наиболее распространенная и старая система, именно эту аббревиатуру чаще всего используют для обозначения систем курсовой устойчивости. На сегодняшний день используется на автомобилях Chery, Chrysler, Citroen, Dodge, Daimler, Fiat, Holden, Hyundai, Jeep, Kia, Mercedes-Benz, Opel, Peugeot, Proton, Renault, Saab, Scania, Smart, Suzuki и Vauxhall;
— ESP (Elektronic Stability Program) — на автомобилях Audi, Bentley, Bugatti, Lamborghini, SEAT, SKODA и Volkswagen;
— IVD (Interactive Vehicle Dynamics) — на автомобилях Ford;
— MSP (Maserati Stability Program) — на автомобилях Maserati;
— PCS (Precision Control System) — на автомобилях Oldsmobile (не выпускаются после 2004 года);
— PSM (Porsche Stability Management) — на автомобилях Porsche;
— RSC (AdvanceTrac with Roll Stability Control) — на автомобилях Ford;
— StabiliTrak — на автомобилях: Buick, Cadillac, Chevrolet (данная система, устанавливаемая на автомобили Corvette, имеет собственное название Active Handling), GMC Truck, Hummer, Pontiac, Saab и Saturn;
— VDC (Vehicle Dynamic Control) — на автомобилях: Alfa Romeo, Fiat, Infiniti, Nissan и Subaru;
— VDIM (Vehicle Dynamics Integrated Management) с VSC (Vehicle Stability Control) — на Toyota, Lexus;
— VSA (Vehicle Stability Assist) — на автомобилях: Acura, Honda и Hyundai.
На сегодняшний день лидирующие позиции на мировом рынке систем курсовой устойчивости занимает немецкая компания Bosch — этими системами оснащается большинство автомобилей в Северной Америке и странах ЕС.
Особенности управления автомобилем с системой курсовой устойчивости
Как было сказано выше, система курсовой устойчивости работает всегда, однако заметить ее срабатывание в критических ситуациях способен лишь опытный водитель, знающий, как спровоцировать или, напротив, предотвратить занос автомобиля. Иногда работа системы мешает таким водителям, поэтому в большинстве случаев они попросту отключают ESP (если такая возможность предусмотрена).
Если же говорить об особенностях управления автомобилем с системой курсовой устойчивости, то здесь нужно выделить два основных момента:
— Не нужно «мешать» системе работать — при возникновении заноса она сама сделает все возможное для предотвращения аварии, поэтому не стоит бешено крутить рулем и нажимать на педаль тормоза;
— Нужно понимать, что система не всесильна, и она не может спасти от сильных заносов, поэтому нужно проходить повороты и делать маневры на разрешенных скоростях — если вы, понадеявшись на систему, войдете в поворот на скользкой дороге со скоростью 100 км/ч, то вы гарантированно окажетесь в кювете. Ведь все подчиняется элементарным законам физики, и обмануть их не в силах даже самой умной автомобильной системе.
К сожалению, электроника не всесильна, и составить программы на все случаи жизни невозможно, поэтому могут возникать ситуации, когда ESP делает не то, что нужно. Например, при заносе задних колес на переднеприводном автомобиле необходимо увеличить скорость, но блок управления системой по той или иной причине, напротив, стремится снизить скорость, и водитель просто не сможет ничего сделать. Такие ситуации возникают крайне редко, и чем более современными становятся системы, тем меньше они совершают ошибок, но нужно быть готовым, что автоматика может дать сбой.
В целом, сегодня нет более совершенной активной системы безопасности, чем система курсовой устойчивости, поэтому не нужно ею пренебрегать — она никогда не растеряется, не перепутает педали, и всегда сделает то, что нужно. А, значит, спасет одну или несколько жизней.
Другие статьи
#Омывающие жидкости
Омывающие жидкости
29.09.2023 | Статьи о запасных частях
Зима и лето, два полюса, между которыми меняется весь наш мир. И в этом мире существуют омывающие жидкости — помощники, которые обеспечивают нашу безопасность на дороге. В этой статье мы окунемся в мир омывающих жидкостей и узнаем, какие они бывают, от чего зависит их температура замерзания и как их правильно выбрать.
#Рассухариватель клапанов
Рассухариватель клапанов: простая работа с клапанами
21.06.2023 | Статьи о запасных частях
Замена клапанов двигателя внутреннего сгорания затрудняется необходимостью съема сухарей — для этой операции используются специальные рассухариватели клапанов. Все об этом инструменте, его существующих типах, конструкции и принципе действия, а также о его выборе и применении читайте в данной статье.
#Переключатель света с регулировкой шкалы
Переключатель света с регулировкой шкалы
14.06.2023 | Статьи о запасных частях
Во многих отечественных автомобилях ранних выпусков широко использовались центральные переключатели света с реостатом, позволяющим регулировать яркость подсветки приборов. Все о данных устройствах, их существующих типах, конструкции, работе, а также об их правильном выборе и замене читайте в статье.
Система курсовой устойчивости ESC – это электрогидравлическая система активной безопасности, главное назначение которой – не дать автомобилю уйти в занос, то есть предотвратить отклонение от заданной траектории движения при резком маневрировании.
ESC имеет еще одно название – “система динамической стабилизации”. Аббревиатура ESC расшифровывается как Electronic Stability Control – электронный контроль устойчивости (ЭКУ).
Система стабилизации – это комплексная система, охватывающая возможности ABS и TCS.
Рассмотрим принцип действия системы, ее основные компоненты, а также положительные и отрицательные стороны эксплуатации.
Что это такое?
Система ESP представляет собой комплекс, который включает в себя входные датчики, блок управления и гидравлический блок системы ABS/ASR со всеми компонентами.
Входные датчики фиксируют конкретные параметры автомобиля и преобразуют их в электрические сигналы. С помощью датчиков система динамической стабилизации оценивает действия водителя и параметры движения автомобиля.
Блок управления системы ESP принимает сигналы от датчиков и формирует управляющие воздействия на исполнительные устройства подконтрольных систем активной безопасности:
- Впускные и выпускные клапаны системы ABS;
- Переключающие и клапаны высокого давления системы ASR;
- Контрольные лампы системы ESP, системы ABS, тормозной системы.
В своей работе блок управления ESP взаимодействует с блоком управления системы управления двигателем и блоком управления автоматической коробки передач (если автомобиль оборудован автоматической трансмиссией).
За счет чего происходит стабилизация?
- Подтормаживания определенных колес;
- Изменения крутящего момента двигателя
- Изменения угла поворота передних колес (при наличии системы активного рулевого управления);
- Изменения степени демпфирования амортизаторов (при наличии адаптивной подвески).
Признаки проблем с системой
- Недостаточная «проворачиваемость» автомобиля;
- Острая реакция на неровности дорожного полотна;
- Снижение уровня сцепления при прохождении поворотов;
- Общее чувство «неуверенности» при движении на высокой скорости.
Система курсовой устойчивости (другое наименование — система динамической стабилизации) предназначена для сохранения устойчивости и управляемости автомобиля за счет заблаговременного определения и устранения критической ситуации. С 2011 года оснащение системой курсовой устойчивости новых легковых автомобилей является обязательным в США, Канаде, странах Евросоюза.
Система позволяет удерживать автомобиль в пределах заданной водителем траектории при различных режимах движения (разгоне, торможении, движении по прямой, в поворотах и при свободном качении).
В зависимости от производителя различают следующие названия системы курсовой устойчивости:
ESP (Electronic Stability Programme) на большинстве автомобилей в Европе и Америке;
ESC (Electronic Stability Control) на автомобилях Honda, Kia, Hyundai;
DSC (Dynamic Stability Control) на автомобилях BMW, Jaguar, Rover;
DTSC (Dynamic Stability Traction Control) на автомобилях Volvo;
VSA (Vehicle Stability Assist) на автомобилях Honda, Acura;
VSC (Vehicle Stability Control) на автомобилях Toyota;
VDC (Vehicle Dynamic Control) на автомобилях Infiniti, Nissan, Subaru.
Устройство и принцип действия системы курсовой устойчивости рассмотрены на примере самой распространенной системы ESP, которая выпускается с 1995 года.Устройство системы курсовой устойчивости
Система курсовой устойчивости является системой активной безопасности более высокого уровня и включает антиблокировочную систему тормозов (ABS), систему распределения тормозных усилий (EBD), электронную блокировку дифференциала (EDS), антипробуксовочную систему (ASR).
Система курсовой устойчивости объединяет входные датчики, блок управления и гидравлический блок в качестве исполнительного устройства.
Входные датчики фиксируют конкретные параметры автомобиля и преобразуют их в электрические сигналы. С помощью датчиков система динамической стабилизации оценивает действия водителя и параметры движения автомобиля.
Используются в оценке действий водителя датчики угла поворота рулевого колеса, давления в тормозной системе, выключатель стоп-сигнала. Оценивают фактические параметры движения датчики частоты вращения колес, продольного ускорения, поперечного ускорения, скорости поворота автомобиля, давления в тормозной системе.
Блок управления системы ESP принимает сигналы от датчиков и формирует управляющие воздействия на исполнительные устройства подконтрольных систем активной безопасности:
впускные и выпускные клапаны системы ABS;
переключающие и клапаны высокого давления системы ASR;
контрольные лампы системы ESP, системы ABS, тормозной системы.
В своей работе блок управления ESP взаимодействует с системой управления двигателем и автоматической коробки передач (через соответствующие блоки). Помимо приема сигналов от этих систем блок управления формирует управляющие воздействия на элементы системы управления двигателем и АКПП.
Для работы системы динамической стабилизации используется гидравлический блок системы ABS/ASR со всеми компонентами.
Принцип работы системы курсовой устойчивости
Определение наступления аварийной ситуации осуществляется путем сравнения действий водителя и параметров движения автомобиля. В случае, когда действия водителя (желаемые параметры движения) отличаются от фактических параметров движения автомобиля, система ESP распознает ситуацию как неконтролируемую и включается в работу.
Стабилизация движения автомобиля с помощью системы курсовой устойчивости может достигаться несколькими способами:
подтормаживанием определенных колес;
изменением крутящего момента двигателя
изменением угла поворота передних колес (при наличии системы активного рулевого управления);
изменением степени демпфирования амортизаторов (при наличии адаптивной подвески) .
Подтормаживание колес производится путем включения в работу соответствующих систем активной безопасности. Работа при этом носит циклический характер: увеличение давления, удержание давления и сброс давления в тормозной системе.
Изменение крутящего момента двигателя в системе ESP может осуществляться несколькими путями:
изменением положения дроссельной заслонки;
пропуском впрыска топлива;
пропуском импульсов зажигания;
изменением угла опережения зажигания;
отменой переключения передачи в АКПП;
перераспределением крутящего момента между осями (при наличии полного привода).
Система, объединяющая систему курсовой устойчивости, рулевое управление и подвеску носит название интегрированной системы управления динамикой автомобиля.
Дополнительные функции системы курсовой устойчивости
В конструкции системы курсовой устойчивости могут быть реализованы следующие дополнительные функции (подсистемы): гидравлический усилитель тормозов, предотвращения опрокидывания, предотвращения столкновения, стабилизации автопоезда, повышения эффективности тормозов при нагреве, удаления влаги с тормозных дисков и и др.
Все перечисленные системы, в основном, не имеют своих конструктивных элементов, а являются программным расширением системы ESP.
Система предотвращения опрокидывания ROP (Roll Over Prevention) стабилизирует движение автомобиля при угрозе опрокидывания. Предотвращение опрокидывания достигается за счет уменьшения поперечного ускорения путем подтормаживания передних колес и снижения крутящего момента двигателя. Дополнительное давление в тормозной системе создается с помощью активного усилителя тормозов.
Система предотвращения столкновения (Braking Guard) может быть реализована в автомобиле, оснащенном адаптивным круиз-контролем. Система предотвращает опасность столкновения с помощью визуальных и звуковых сигналов, а в критической ситуации — путем нагнетания давления в тормозной системе (автоматического включения насоса обратной подачи).
Система стабилизации автопоезда может быть реализована в автомобиле, оборудованным тягово-сцепным устройством. Система предотвращает рыскание прицепа при движении автомобиля, которое достигается за счет торможения колес или снижения крутящего момента.
Система повышения эффективности тормозов при нагреве FBS (Fading Brake Support, другое наименование — Over Boost) предотвращает недостаточное сцепление тормозных колодок с тормозными дисками, возникающее при нагреве, путем дополнительного увеличения давления в тормозном приводе.
Система удаления влаги с тормозных дисков активируется на скорости свыше 50км/ч и включенных стеклоочистителях. Принцип работы системы заключается в кратковременном повышении давления в контуре передних колес, за счет чего тормозные колодки прижимаются к дискам и происходит испарение влаги.
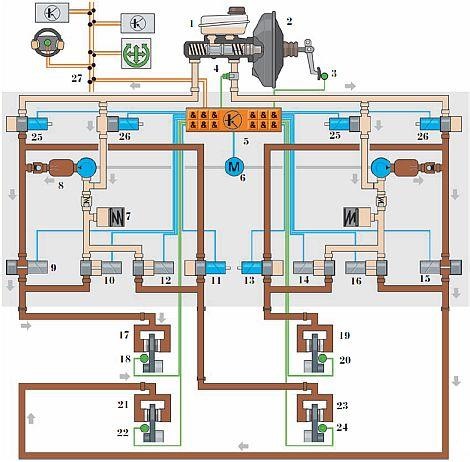
Схема системы курсовой устойчивости ESP (рис. в низу)
1компенсационный бачок
2вакуумный усилитель тормозов
3датчик положения педали тормоза
4датчик давления в тормозной системе
5блок управления
6насос обратной подачи
7аккумулятор давления
8демпфирующая камера
9впускной клапан переднего левого тормозного механизма
10выпускной клапан привода переднего левого тормозного механизма
11впускной клапан привода заднего правого тормозного механизма
12выпускной клапан привода заднего правого тормозного механизма
13впускной клапан привода переднего правого тормозного механизма
14выпускной клапан привода переднего правого тормозного механизма
15впускной клапан привода заднего левого тормозного механизма
16выпускной клапан привода заднего левого тормозного механизма
17передний левый тормозной цилиндр
18датчик частоты вращения переднего левого колеса
19передний правый тормозной цилиндр
20датчик частоты вращения переднего правого колеса
21задний левый тормозной цилиндр
22датчик частоты вращения заднего левого колеса
23задний правый тормозной цилиндр
24датчик частоты вращения заднего правого колеса
25переключающий клапан
26клапан высокого давления
27шина обмена данными
Свойство
автомобиля двигаться прямолинейно без
корректирующих
действий водитель
при неизменном положении рулевого
колеса, называется курсовой устойчивостью.
Нарушение
курсовой устойчивости при прямолинейном
движении автомобиля может быть из-за
бокового ветра, ударов колес о неровности
дороги, разных по величине тяговых или
тормозных сил на колесах правой и левой
стороны. Это может быть вызвано и
неправильными приемами вождения (резким
торможением или разгоном), а также
техническими неисправностями (неправильная
регулировка тормозных механизмов,
прокол или разрыв шины и т.п.).
Часто
предпосылкой потери курсовой устойчивости
является скорость автомобиля, не
соответствующая дорожным условиям,
когда тяговая сила Рт
на ведущих колесах приближается к силе
сцепления Рсц
и возможно их буксование. Условие
отсутствие буксования для заднеприводного
автомобиля
РТ<Рсц2
Сила
тяги при ускоренном движении:
 Поэтому
Поэтому
большая скорость сама по себе не может
нарушить курсовую устойчивость, но она
усиливает вероятность опасных
последствий.
Вместе
с тем водитель имеет возможность
уменьшить силу тяги, уменьшив подачу
топлива. Поэтому начавшееся буксование
колес может привести к аварии, только
в результате неправильных или
несвоевременных действий водителя.
При движении
автомобиля по неровной дороге со
скоростью близкой к Vбукс.
наезд колеса на выступ или впадину
приводит к изменению вертикальной и
соответственно касательной реакции
на одном из ведущих колес автомобиля,
что приводит к заносу
20 Устойчивость автомобиля при криволинейном движении
При
криволинейном движении автомобиля
поперечной силой, вызывающей его занос
или опрокидывание, является центробежная
сила. Для ее определения рассмотрим
схему
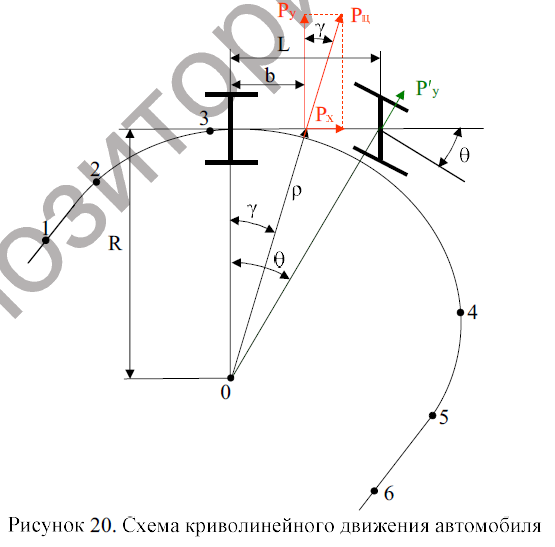
Из
рисунка видно, что на участке 1-2
автомобиль движется прямолинейно и его
управляемые колеса находятся в нейтральном
положении. На участке 2-3 водитель
поворачивает рулевое колесо, и автомобиль
движется по кривой уменьшающегося
радиуса. На участке 3-4 управляемые колеса
остаются повернутыми на угол и,
а автомобиль движется по дуге постоянного
радиуса. На участке 4-5 водитель поворачивает
рулевое колесо в обратном направлении
и радиус траектории движения увеличивается.
На участке 5-6 управляемые колеса находятся
в нейтральном положении, и автомобиль
снова движется прямолинейно.
Суммарная
боковая сила, действующая на автомобиль
при криволинейном движении:

Сила
Ру
действует только во время поворота
передних колес. При входе автомобиля в
поворот скорость положительна, и сила
Ру,
складываясь с силой Ру,
увеличивает опасность опрокидывания
или заноса.

Как
видно из схем на рисунке 21, под действием
центробежной силы Ру,
автомобиль
может опрокинуться относительно оси,
проходящей через центры контактов шин
наружных (по отношению к центру поворота)
колес с дорогой.
Для
обеспечения безопасности движения
автомобиля по кривым малого радиуса на
дороге устраивают виражи, на которых
проезжая часть и обочины имеют поперечный
наклон к центру кривой.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
EBD (Electronic Brake Force Distribution) — система распределения тормозных усилий.
В большинстве современных автомобилей ABS работает вместе с EBD (Electronic Brake Force Distribution) — системой распределения тормозных усилий. Система распределения тормозных усилий представляет собой программное расширение антиблокировочной системы тормозов. Другими словами, система использует конструктивные элементы системы ABS в новом качестве.
Система EBD позволяет эффективно тормозить в разных дорожных условиях, учитывая участки дороги с разнородным покрытием, загруженность автомобиля и техническое состояние покрышек. EBD распределяет тормозные усилия на каждое колесо в отдельности, чтобы обеспечить оптимальное сцепление с дорогой.
Принципиально отличие EBD и других систем от базовой ABS, в том что они помогают водителю управлять автомобилем постоянно, а не только при экстренном торможении.
Принцип работы системы распределения тормозных усилий
Работа системы EBD, также как и система ABS, носит цикличный характер. Цикл работы включает три фазы:
- удержание давления;
- сброс давления;
- увеличение давления.
По данным датчиков угловой скорости колес блок управления ABS сравнивает тормозные усилия передних и задних колёс. Когда разница между ними превышает заданную величину, включается алгоритм системы распределения тормозных усилий.
На основании разности сигналов датчиков блок управления определяет начало блокирования задних колес. Он закрывает впускные клапаны в контурах тормозных цилиндров задних колес. Давление в контуре задних колес удерживается на текущем уровне. Впускные клапаны передних колёс остаются открытыми. Давление в контурах тормозных цилиндров передних колес продолжает увеличиваться до начала блокирования передних колес.
Если колеса задней оси продолжают блокироваться, открываются соответствующие выпускные клапаны и давление в контурах тормозных цилиндров задних колес уменьшается.
При превышении угловой скорости задних колес заданного значения, давление в контурах увеличивается. Происходит торможение задних колес.
Работа системы распределения тормозных усилий заканчивается с началом блокирования передних (ведущих) колес. При этом в работу включается система ABS.
Еще работа EBD поможет распределить тормозную силу в случае резкого торможения в повороте противостояв заносу и сносу автомобиля, потери траектории пути. При поворотах сильнее нагружаются внешние колеса относительно поворота, а нагрузка на внутренние колеса уменьшена, тем самым автомобиль подвержен риску заноса или потери траектории и вылета с поворота. В этом случае EBD уменьшит тормозное усилие на внешние колеса тем самым не дав им заблокироваться. Автомобиль становится управляемым, значительно повышается уровень безопасности движения.
С системой EBD можно смело тормозить в повороте и на смешанном покрытии. Электроника по разности частот вращения «поймет», что колеса попали на участки с разнородным покрытием, и уменьшит тормозные силы на колесах, которые имеют лучшее сцепление с дорогой. Кстати, интенсивность замедления в этом случае снизится и будет определяться силой трения колеса (колес), имеющего наихудшее сцепление с дорогой.
Также система EBD при торможении учитывает загрузку автомобиля.
Тормозное усилие между передними и задними колесами оптимизируются, при этом обеспечивается максимально быстрое торможение.
Например, при торможении автомобиля с более чем одним человеком внутри, система EBD увеличивает тормозное усилие на задние колеса по сравнению с тем случаем, когда внутри находится только водитель, повышая при этом эффективность торможения по сравнению с автомобилем без системы EBD.
Таким образом, работа EBD способствует уменьшению тормозного пути и возможностью управлять автомобилем в аварийных ситуациях.
Принцип функционирования системы VSC
Обычно резкие повороты руля в водительской практике применяются в исключительных случаях, когда требуется избежать столкновения с другим ТС или наезда на препятствие/пешехода. Если трасса сухая, а покрышки имеют достаточную глубину протектора, с этим проблем не возникает. А вот на скользкой дороге подобные действия обычно приводят к заносу, к уходу с прямолинейной траектории. Далеко не всем водителям удаётся в подобных ситуациях вернуть автомобилю управляемость, что обычно приводит к развороту машины и возникновению аварийной ситуации.
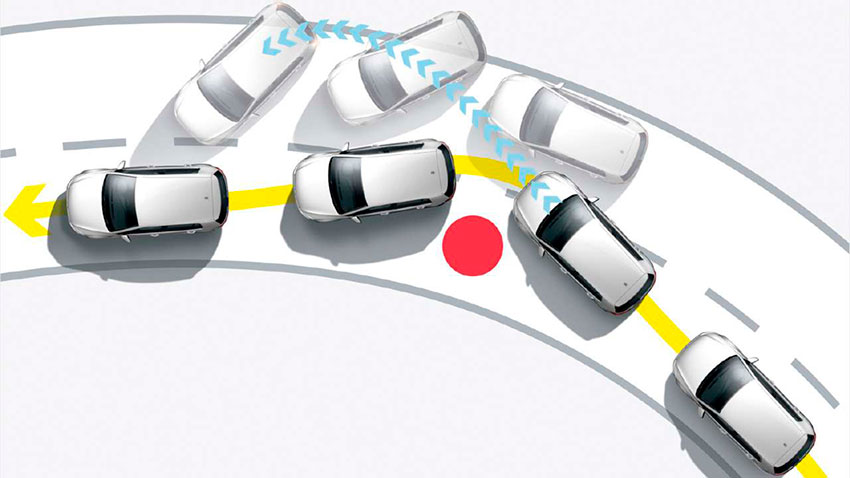
Система VSC как раз и призвана предотвращать заносы, блокируя вращение колёс со стороны, противоположной вектору движения. Беря управление на себя, она способна исправить ошибки водителя, позволяя завершить начатый манёвр, как если бы дорога не была скользкой.
Рассмотрим кинематику бокового скольжения. Центробежная сила при поворотах на относительно больших скоростях заставляет заднюю часть автомобиля двигаться с ускорением в направлении, противоположном повороту. Если сцепление автопокрышек с дорожным полотном хорошее, сила трения препятствует заносу кормы машины. Но если скорость авто превысила некий порог, или же если дорога скользкая (вода, снег, ледяная корка), величина центробежной силы оказывается больше силы сцепления. В этом случае задняя часть автомобиля начинает сваливаться в сторону, несмотря на то, что руль уже возвращён в положение, при котором колёса смотрят прямо.
Такое явление и называют боковым скольжением. Отметим, что в определённых ситуациях смещаться могут и передние колёса.
https://www.youtube.com/watch?v=VH6D3vYvVJ8
И ещё один нюанс: если боковое скольжение началось при резком повороте руля на сухом дорожном покрытии, оно редко бывает затяжным, и обычно реакции водителя бывает достаточно, чтобы удержать автомобиль от дальнейшего заноса. Другое дело – скользкая автотрасса. Здесь одной реакции недостаточно, поскольку единственное средство, позволяющее водителю остановить занос – это вращение руля в противоположную сторону, чего оказывается недостаточно для выравнивания машины. Торможение также оказывается бесполезным, поскольку блокируются либо оба задних, либо оба передних колеса, что при уходе от продольной оси никак не способствует возвращению транспортного средства в исходное состояние. Это означает, что только система VSC в автомобиле способна эффективно справляться с подобными ситуациями.
Если происходит проскальзывание задних колёс, такое явление называют избыточной поворачиваемостью, и в этом случае заносит заднюю часть авто в сторону, противоположную повороту. Если убрать поступательную компоненту движения, то останется только вращение авто вокруг вертикальной оси, что может стать причиной его разворота. Понятно, что такие ситуации смертельно опасны, даже если предположить, что дорога пустынна и встречных машин нет – автомобиль может просто съехать в кювет, что при движении на большой скорости приведёт к его опрокидыванию.
Если начинают проскальзывать передние колёса, заносить в сторону, противоположную повороту, будет переднюю часть ТС. В этом случае говорят о недостаточной поворачиваемости, но последствия будут теми же – занос с выездом на встречку и возможный разворот, но уже против часовой стрелки.
Цели использования кошелька
Выбирается валюта для электронного средства платежа — это могут быть рубли или иностранная валюта.
Анонимный электронный кошелек подходит для мелких трат, не требующих прохождения процедуры идентификации — предоставления документов, подтверждающих личность. Для его регистрации достаточно указать на сайте кредитной организации минимальное количество данных. Такой кошелек позволяет хранить только рубли и имеет ограничение по максимальной сумме вывода в месяц.
Неперсонифицированные кошельки с упрощенной идентификацией требуют предоставления банку определенного количества информации взамен на расширенные возможности использования.
Максимум возможностей дает персонифицированный кошелек: максимальная сумма составляет 600 тысяч рублей, отсутствуют ограничения на перевод в месяц. Для оформления персонифицированного кошелька требуется прохождение полной идентификации и предоставление оригиналов либо заверенных нотариусом копий документов.
Когда нужно отключать ESP
Вокруг отключения системы стабилизации возникают горячие споры. С одной стороны рубежа водители с горячей кровью – любители острых ощущений и запредельных углов заноса. С другой стороны – опытные водители, предъявляющие аргумент, что система стабилизации мешает выйти из очень сильного заноса. Для того чтобы развеять лишние мифы относительно отключения ESP, перечислим её минусы:
- ESP не умеет выводить переднеприводные автомобили из сильного заноса, т. к. для этого нужно не уменьшение, а резкое увеличение крутящего момента на передних колёсах.
- На полноприводных автомобилях в условиях гололёда увеличение крутящего момента также предпочтительнее торможения.
- ESP ведёт себя неадекватно на рыхлом снегу при небольшой скорости движения.
- На сильно сдутых колёсах ESP может сильно мешать водителю.
Довольно часто у счастливых обладателей новых и современных автомобилей возникает вопрос – что такое ESP, для чего это нужно и нужно ли вообще? С этим стоит подробно разобраться, что, собственно, и сделаем далее.
Вопреки распространенному мнению управление автомобилем дело не всегда простое. В особенности это утверждение актуально для ситуаций, когда траектория движения затрудняется различными внешними факторами – будь то сложные дорожные изгибы или непростые погодные условия. А нередко и то, и другое вкупе. Главная опасность в таких случаях – занос, который может вызвать сложности с управлением, а в некоторых моментах даже неконтролируемое и непредсказуемое движение транспортного средства, способное привести к аварии. Причем трудности могут возникнуть и у новичков, и у уже достаточно опытных водителей. Справиться с подобной проблемой призвана специальная система, обозначаемая аббревиатурой ESP.
Логотип системы ESP
ESP или Electronic Stability Program – это название в русскоязычном варианте означает электронная система динамической стабилизации автомобиля или по-другому система курсовой устойчивости. Другими словами, ESP представляет собой составляющую активной системы безопасности, которая способна компьютером управлять моментом силы одного или даже одновременно нескольких колес, тем самым устраняя боковое движение и выравнивая положение автомобиля.
Подобные электронные устройства выпускаются разными компаниями, но крупнейшим и признанным производителем ESP (и именно под этой торговой маркой) является концерн Robert Bosch GmbH.
Аббревиатура ESP является наиболее распространенной и общепринятой для большинства европейских и американских автомобилей, но не единственной. У разных автомобилей, на которых система курсовой устойчивости устанавливается, ее обозначения могут отличаться, но сути и принципа действия это не меняет.
Пример аналогов ESP для определенных марок машин:
- ESC (Electronic Stability Control) – для Hyundai, Kia, Honda;
- DSC (Dynamic Stability Control) – для Rover, Jaguar, BMW;
- DTSC (Dynamic Stability Traction Control) – для Volvo;
- VSA (Vehicle Stability Assist) – для Acura и Honda;
- VSC (Vehicle Stability Control) – для Toyota;
- VDC (Vehicle Dynamic Control) – для Subaru, Nissan и Infiniti.
Удивительно, но широкую известность ESP получила не тогда, когда была создана, а несколько позже. Да еще и благодаря скандалу в 1997 году, связанному с серьезными недостатками, разработанного тогда Mercedes-Benz А-класса. Этот компактный автомобиль ради улучшения комфорта получил довольно высокий кузов, но при этом и высокий центр тяжести. Из-за этого машина обладала склонностью к серьезным кренам, а также подвергалась опасности опрокидывания при выполнении маневра «переставка». Решен вопрос был установкой на компактные модели Мерседес системы курсовой устойчивости. Так ESP получила известность.
Принцип работы Electronic Stability Program
Из теории автомобиля известно, что существуют два нежелательных явления при движении – избыточная и недостаточная поворачиваемость.
В идеале, когда наступает предел сцепления колёс с дорогой, автомобиль должен скользить наружу поворота всеми четырьмя колёсами с одинаковой интенсивностью, точно так же прекращая скольжение одновременно передней и задней осью.
Реально это случается редко, поэтому одна ось неминуемо обгоняет другую, что приводит к появлению ненулевого угла между продольной осью автомобиля и касательной к его траектории.
Причём угол увеличивается, реакция водителя может быть неправильной или запоздалой, машина начинает совершать курсовые колебания, что и означает потерю стабилизации и переход в неуправляемое вращение.
Избыточная управляемость означает опережение в уводе или срыве задней оси. Машина поворачивает нос внутрь поворота, развитие явления принято называть заносом. В определённой мере это условно, но терминология сложившаяся.
Обратная ситуация считается недостаточной управляемостью. Первой срывается передняя ось, автомобиль «плужит», уходя наружу поворота, при этом почти не слушается руля, поскольку наименьшее сцепление именно у управляемых колёс.
Занос
Попасть в занос может любой автомобиль, хотя у заднеприводных, тем более заднемоторных компоновок такая вероятность больше, поскольку именно на заднюю ось приходится избыток тяги в первом случае и основная масса во втором.
Ещё в автошколах водителей учат, что для компенсации заноса надо поворачивать руль в сторону заноса и сбрасывать газ.
Советы настолько же правильные, насколько, как это ни парадоксально, бесполезные, и даже вредные:
- водитель и так инстинктивно вывернет руль в сторону заноса, это естественное движение в случаях, когда нос машины уходит в сторону от траектории;
- необходимо точно дозировать угол и время поворота руля, на что неопытный человек не способен;
- для стабилизации машины надо выполнить компенсирующее обратное движение руля, чему не учат;
- сброс газа поможет только заднеприводной машине, при заносе переднего привода или полного газ надо наоборот, добавлять.
Система ESP отреагирует куда адекватней, просто притормозив наружное колесо, а также обеспечив правильное управление тягой, в зависимости от типа привода.
Сам тип начавшейся потери управляемости компьютер заметит по датчику вращения кузова и воздействию водителя на рулевое колесо. Причём влияние будет строго дозированным, без возникновения колебательного процесса.
Предотвращается самое страшное и типичное развитие ситуации, когда машину начинает «разматывать» с нарастанием амплитуды и выбрасывает с дороги на втором или третьем лихорадочном вращении руля запаниковавшим водителем.
Таким образом, вмешательство системы проявится двояко:
- произойдёт компенсация заноса на первом же колебании кузова;
- отклонение от траектории плавно погасится, без заброса в обратную от первого смещения сторону.
Пока машина сохраняет хоть какое-то сцепление с дорогой, ESP способна надёжно погасить занос в самом его начале, водитель не успеет даже испугаться, а скорее всего ничего и не заметит.
Единственное, что ему доступно в штатной ситуации – высвечивание лампочки на передней панели, говорящей, что система сработала и надо быть осторожней, машина на пределе устойчивости.
Снос
При опережающей потери зацепа на передней оси автомобиля, да ещё и переднем приводе, ситуация становится совсем неприятной для рядового водителя:
- скользят именно управляемые колёса, машина не реагирует на поворот руля;
- для компенсации надо совершать действия, прямо противоположные инстинктивным, распускать руль в ту же сторону, куда сносит нос машины, а вместо сброса газа поддерживать нейтральную тягу на передних колёсах или даже добавлять крутящий момент;
- всё происходит неожиданно, поскольку переднеприводные машины устойчивее по своей природе;
- снос может совершенно внезапно перейти в занос из-за продольного перераспределения веса автомобиля.
ESP точно так же, как и в предыдущем случае, спокойно отреагирует подтормаживанием нужных колёс, возьмёт на себя управление тягой, а изменением степени усиления рулевого управления прозрачно намекнёт водителю на неправильные действия рулём.
С работающими на пределе передними колёсами система ничего делать не станет, им и так тяжело, а аккуратно притормозит заднее внутреннее колесо. Обычно этого достаточно для стабильного восстановления траектории.
Принцип действия электронной стабилизации
Во время движения авто система курсовой устойчивости работает постоянно, причем независимо от режима – в процессе разгона, торможения и езды с постоянной скоростью. Собирая данные от группы датчиков и других помогающих систем, контроллер сравнивает полученную картину с эталонной, заложенной в собственной памяти. Обнаружив отклонения, угрожающие безопасности автомобиля и пассажиров, электронный блок вмешивается в управление и старается исправить ситуацию.
Алгоритм работы ESP стоит показать на примере бокового сноса машины в левом повороте:
- Факт заноса отмечает датчик углового ускорения (G-сенсор) и передает информацию контроллеру.
- Дополнительные данные ЭБУ получает от датчиков вращения колес и положения баранки.
- По совокупности полученных сигналов электронный блок «понимает» скорость бокового смещения и его направление. В результате электромагнитным клапанам гидроблока отдается команда притормаживать левое заднее колесо с определенным усилием.
- Одновременно подается сигнал основному контроллеру автомобиля уменьшить подачу горючей смеси в цилиндры, дабы снизить передачу крутящего момента на ведущую ось.
- Результат: независимо от действий водителя автомобиль замедляется и выравнивается в повороте.

При взаимодействии ESP с другими электронными «помощниками» курсовая устойчивость автомобиля может обеспечиваться дополнительными средствами – временной блокировкой свободного дифференциала (межосевого и межколесного), включением антипробуксовочной системы и точным распределением тормозных усилий. В машине, оборудованной автоматической коробкой передач с электронным управлением (робот, вариатор), ESP может переключиться на пониженную скорость либо ввести в действие зимний режим.
По сути, активная система стабилизации избавляет автолюбителя от необходимости обучаться экстремальной езде. Входя в поворот, водитель просто вращает баранку, возлагая остальные действия на ESP. Но следует помнить, что возможности электроники не безграничны и не все аварийные ситуации она способна предотвратить.
Сущность системы
Систему ЭКУ можно рассматривать как расширенный вариант антиблокировочной системы тормозов (АБС). Многие узлы объединены с системой АБС, но вдобавок ЭКУ требует наличия таких компонентов, как датчик положения руля и МЭМС гироскоп, следящий за реальным поворотом автомобиля. При несоответствии показаний гироскопа показаниям датчика поворота руля, система применяет торможение одного (или нескольких) из колёс машины для того, чтобы предотвратить начинающийся занос.
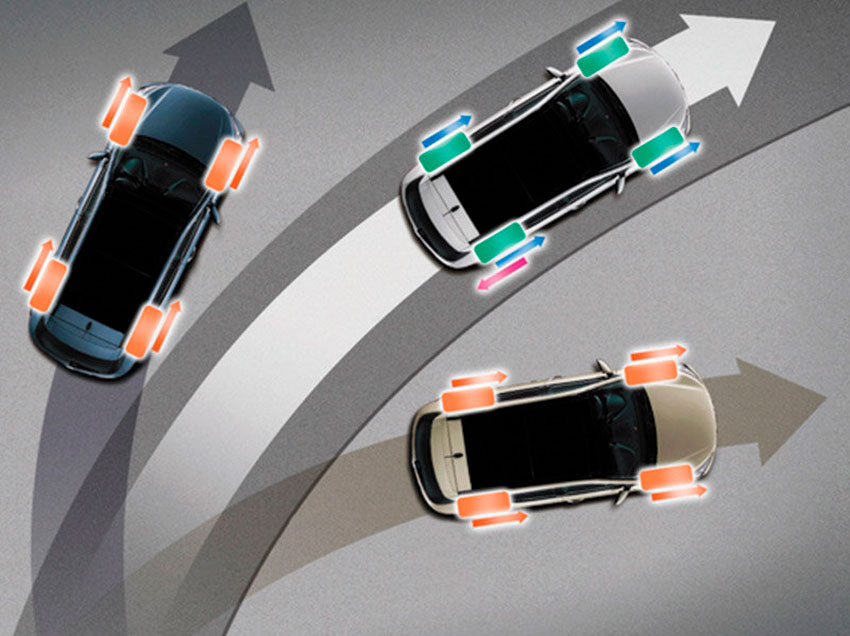
Срабатывает ESC в опасных ситуациях, когда возможна или уже произошла потеря управляемости автомобилем. Путём притормаживания отдельных колес система стабилизирует движение. Она вступает в работу, когда на большой скорости при прохождении поворота передние колеса сносит с заданной траектории в направлении действия сил инерции, то есть по радиусу большему, чем радиус поворота. ESC в этом случае притормаживает заднее колесо, идущее по внутреннему радиусу поворота, придавая автомобилю большую поворачиваемость и направляя его в поворот. Одновременно с притормаживанием колес ESC снижает обороты двигателя.
Если при прохождении поворота происходит занос задней части автомобиля, ESC активизирует тормоз переднего колеса, идущего по наружному радиусу поворота. Таким образом, появляется момент противовращения, исключающий боковой занос. Когда скользят все четыре колеса, ESC самостоятельно решает, тормозные механизмы каких колес должны вступить в работу. Время реакции ESC — 20 миллисекунд. Работает система на любых скоростях и в любых режимах движения.
Данная система пока является наиболее эффективной системой безопасности. Она способна компенсировать ошибки водителя, нейтрализуя и исключая занос, когда контроль над автомобилем уже потерян, однако её возможности ограничены: если радиус поворота слишком мал или скорость в повороте превышает допустимые границы, никакая программа стабилизации не поможет.
Устройство системы курсовой устойчивости
Система курсовой устойчивости является системой активной безопасности более высокого уровня и включает антиблокировочную систему тормозов (ABS), систему распределения тормозных усилий (EBD), электронную блокировку дифференциала (EDS), антипробуксовочную систему (ASR).
Система курсовой устойчивости объединяет входные датчики, блок управления и гидравлический блок в качестве исполнительного устройства.
Входные датчики фиксируют конкретные параметры автомобиля и преобразуют их в электрические сигналы. С помощью датчиков система динамической стабилизации оценивает действия водителя и параметры движения автомобиля.
Используются в оценке действий водителя датчики угла поворота рулевого колеса, давления в тормозной системе, выключатель стоп-сигнала. Оценивают фактические параметры движения датчики частоты вращения колес, продольного и поперечного ускорения, угловой скорости автомобиля, давления в тормозной системе.
Блок управления системы ESP принимает сигналы от датчиков и формирует управляющие воздействия на исполнительные устройства подконтрольных систем активной безопасности:
- впускные и выпускные клапаны системы ABS;
- переключающие и клапаны высокого давления системы ASR;
- контрольные лампы системы ESP, системы ABS, тормозной системы.
В своей работе блок управления ESP взаимодействует с системой управления двигателем и автоматической коробки передач (через соответствующие блоки). Помимо приема сигналов от этих систем блок управления формирует управляющие воздействия на элементы системы управления двигателем и АКПП.
Для работы системы динамической стабилизации используется гидравлический блок системы ABS/ASR со всеми компонентами.
Это интересно: Что такое SG (SteuerGerat)?
Что это – ESP?
Появление системы обусловлено развитием электронной промышленности, так как ее работа основана на управлении курсовой устойчивости авто подобным блоком. Сейчас прогресс дошел до такого уровня, что установка ESP считается обычным делом для всех автомобилей, в том числе и машин бюджетного сегмента. В первое же время ею могли похвастаться только авто премиального класса.
В разных марках она может называться по-разному: VSC, DSC, ESC и т. д. Каждый завод-изготовитель по-своему трактует название.
Расскажем на примере популярных брендов, как может быть зашифрована система:
- DTSC – в автомобилях «Volvo»;
- ESC – известных азиатских марках «Kia», «Huyndai», «Honda»;
- VSA – японской «Acura»;
- DSC – «BMW», «Jaguar», «Land Rover»;
- VSC – «Toyota»;
- VDC – «Nissan», «Infiniti», «Subaru».
Вне зависимости от аббревиатуры суть ее не меняется. Она следит за выбранным курсом движения автомобиля и предотвращает возможные негативные явления.
Во время движения по дороге возникают факторы, которые могут изменить курс машины. Это:
– перестройка между рядами;
– обгон;
– прохождение поворотов;
– возникновение экстремальных ситуаций.
В этих случаях возрастает вероятность, особенно на мокрой или скользкой дороге, попадания в занос. Это чревато созданием аварийной ситуации, получением травм водителем и пассажирами, серьезными повреждениями машины.
Электронные «мозги» автомобиля при помощи датчиков внимательно следят за изменением направления движения и влияния поперечных сил на транспортное средство. При получении информации, что машина выходит за рамки дозволенных параметров, ЭБУ дает команду на механизмы трансмиссии, которая выравнивает колеса в нужном положении.