Плавность хода автомобиля
Общие сведения о плавности хода
Автомобиль является сухопутным транспортным средством, поэтому перемещается по дорогам с различным покрытием и разного качества. При этом поездка по неровной дороге на одном автомобиле не вызывает неприятных ощущений, а даже непродолжительная езда на другом автомобиле по той же дороге вызывает неприятные ощущения, приводит к быстрой утомляемости и даже расстройствам здоровья.
В данном случае можно сказать, что первый автомобиль обладает плавным ходом, а второй, обладая жестким ходом, передает все неровности дороги от колес и подвески непосредственно кузову, водителю и пассажирам.
Под плавностью хода понимают совокупность свойств, обеспечивающих ограничение в пределах установленных норм вибронагруженности водителя, пассажиров, груза и автомобиля.
Нормы вибронагруженности устанавливаются так, чтобы на дорогах, для которых предназначен данный автомобиль, вибрации не вызывали у водителя и пассажиров неприятных ощущений, а вибрации грузов и автомобиля – их повреждений.
Выступы и впадины, имеющие длины волн от 100 м до 10 см называют микропрофилем дороги. Он является основным источником сил, вызывающих колебания автомобиля на подвеске.
Мелкие неровности дорожной поверхности с длиной волн менее 10 см называют шероховатостью дороги. Они могут стать причиной высокочастотной вибрации и связанного с ней шума высокого уровня при движении транспортного средства.

Плавность хода зависит от характера и величины возмущающих сил, вызывающих колебания, общей компоновки автомобиля и отдельных его конструктивных особенностей, главным образом от системы подрессоривания, а также от мастерства водителя.
Возмущающие силы могут возникать под действием внутренних и внешних причин. К внутренним причинам относятся неуравновешенность деталей и неравномерность их вращения. Внутренние возмущающие факторы может вызывать дисбаланс работающего двигателя, узлов и деталей трансмиссии, ходовой части, в т. ч. колес. Из внешних причин наибольшее значение имеют неровности пути.
Под влиянием внутренних причин возникают главным образом высокочастотные колебания – вибрации, влияние которых на пассажиров не столь значительно. Конечно, сильный дисбаланс колес или, например, гнутый карданный вал, могут вызвать ощутимую тряску при движении, но эти случаи связаны с явной неисправностью элементов конструкции автомобиля. Поэтому плавность хода рассматривается с точки зрения воздействия, оказываемого неровностями пути.
Основными устройствами, защищающими автомобиль, водителя, пассажиров и груз от большой вибронагруженности со стороны дороги является подвеска и шины, а для пассажиров и водителя также упругие сидения.
На человека негативно влияет амплитуда, частота и ускорение колебательного движения. Колебания кузова автомобиля складываются из вынужденных колебаний, имеющих случайно меняющиеся частоты, и свободных колебаний, имеющих постоянную частоту (собственная частота колебаний кузова).
Свободные колебания преобладают над вынужденными, поэтому снижение интенсивности колебаний с собственной частотой приводит к улучшению плавности хода автомобиля на любой дороге.
***
Влияние колебаний и вибраций на человека
При движении автомобиля его кузов испытывает колебания и вибрации, которые организм человека переносит по-разному. Колебания с низкой частотой (до 900…1100 колебаний в минуту) воспринимаются человеком как отдельные циклы изменения нагрузки или положения. Колебания более высоких частот воспринимаются слитно и называются вибрациями.
Частота колебаний кузова на рессорах лежит в пределах от 80 до 150 колебаний в минуту, частота колебаний осей между рессорами и землей (шинами) равна 360…900 колебаний в минуту. Вибрации двигателя, трансмиссии и кузова происходят с частотой 1000…4200 колебаний в минуту.
Организм человека воспринимает вибрации или через их звуковые проявления или непосредственно как силовые воздействия. В автомобиле пассажиры и водитель изолированы от непосредственного силового воздействия вибрации подушками сидений. Только ноги на полу могут воспринимать эти вибрации, силовые воздействия которых почти полностью устраняются применением упругих ковриков.
Наибольшее влияние на организм человека оказывают колебания кузова.
Колебательный процесс характеризуется частотами, амплитудами, скоростью колебания, ускорениями и скоростью изменения ускорений.
Для повышения комфортабельности автомобиля необходимо по возможности уменьшить амплитуду колебаний. При амплитудах колебаний меньших 35…40 мм, амортизационная способность человеческого организма полностью устраняет колебания головы. Большие амплитуды вызывают колебания головы, что приводит к неприятным ощущениям и быстрой усталости.
Частота колебаний более существенно влияет на организм человека. Установлено, что снижение числа колебаний менее 50 колебаний в минуту часто вызывает у пассажиров явление «морской болезни», а превышение 130 колебаний в минуту приводит к ощущению резких толчков.
На ощущения человека при колебаниях – его энергетические затраты и нервные нагрузки – могут оказывать существенное влияния разные параметры колебательного процесса, в зависимости от частоты колебаний.
При частотах до 4..6 колебаний в минуту, в пределы которых полностью укладывается весь низкочастотный диапазон колебаний автомобиля, ощущения в первую очередь пропорциональны ускорениям при колебаниях. Поэтому для оценки плавности хода автомобилей наиболее распространенным измерителем являются вертикальные ускорения, определяемые в характерных точках колебательной системы. По величине вертикальных ускорений кузова автомобиля можно также судить о сохранности перевозимого груза.
Если ускорения кузова больше ускорения свободного падения g = 9,81 м/с2 , то незакрепленный груз отрывается от пола и затем падает обратно, поскольку некоторое время находится в состоянии невесомости.
При оценке плавности хода по ускорениям необходимо, кроме величины ускорений, учитывать их повторяемость. Совокупный учет этих факторов соответствует взглядам физиологов на утомление, как на явление, связанное с интенсивность и частотой внешних раздражителей.
Следует отметить также, что при частотах колебаний кузова до 5…6 колебаний в минуту на ощущения человека оказывает заметное влияние скорость ускорений, т.е. третья производная перемещений по времени. Так, например, скорости изменения ускорений до 25 м/с2 вызывают беспокоящие ощущения, а при 40 м/с2 – неприятные ощущения.
***
Показатели плавности хода
Колебания кузова автомобиля характеризуются следующими показателями:
- период колебаний t – время, в течение которого кузов совершает полное колебательное движение;
- угловая частота Ω – величина, численно равная произведению частоты колебаний на 2π: Ω = 2πυ = 2π/t.
Угловая частота соответствует фазе колебаний без начальной фазы в момент времени t = 1 сек.
Частота колебаний n – число колебаний в минуту:
n = 60/t = 60Ω/2π = 30/π√(с/m),
где m – масса тела;
с – жесткость упругого элемента подвески.
Деформация f0 упругого элемента подвески при ее статическом положении зависит от его жесткости и силы тяжести подрессоренной массы автомобиля:
f0 = Gг/с,
где Gг – вес подрессоренной массы автомобиля.
Тогда можно записать:
n = (30/π)√[(Gг/f0)(g/Gг)] = (30/π)√(g/f0).
Анализируя эту формулу можно сделать вывод, что чем больше статический прогиб подвески, тем меньше частота собственных колебаний. Используя мягкие подвески, уменьшают частоту собственных колебаний кузова, повышая комфортабельность автомобиля.
***
Способы повышения плавности хода автомобиля
Текст специально для офисных бездельников, которые не хотят палиться перед начальством в наушниках:
Как вы поняли, здесь пойдёт речь о том, что заставляет ваш позвоночник осыпаться в трусы.
Плавность хода оценивается частотой колебания кузова с грузом и пассажирами на подвеске.
Наиболее комфортная для человека частота колебаний – это естественная для на нас, которую мы испытываем при ходьбе, то есть примерно 1 герц.
Если выше, то жестко, а если ниже, то может укачивать.
Достижение этого параметра обеспечивается соответствием жесткости упругого элемента приходящейся на него массе кузова с грузом и пассажирами.
То есть, на тяжелом автомобиле пружины должны быть жестче чем на лёгком при равной плавности хода.
Но одно получается фактически неизменно: статический прогиб упругого элемента, и он должен быть равен примерно 25 сантиметров.
То есть, это разница между высотой пружины в свободном состоянии вне автомобиля и её высотой в подвеске, под массой кузова автомобиля с пассажирами и грузом.
При чём, в приведённом к колесу виде. В одних подвесках пружины работают напрямую, а в других через рычаг. Вот эту рычажность нужно учитывать.
К сожалению, по ряду объективных причин, на практике так получается очень редко, и в реальности на большинстве современных автомобилей жесткость подвески гораздо выше желаемой.
Во-первых, при низкой жесткости сложно добиться необходимой энергоёмкости. То есть, чтобы мягкую подвеску не пробивало при наезде на препятствия, необходимо делать большой ход сжатия.
Большой ход сжатия мешают сделать 2 вещи: ограничения по компоновке и ограничения по кинематике подвески.
Все рычаги подвески работают по радиусам и при большом ходе увеличиваются нежелательные взаимные перемещения элементов подвески.
Частично проблему энергоёмкости решают применением буферов сжатия.
В этом случае, при сильных ходах, после касания буферов, жесткость подвески складывается из жесткости пружины и жесткости резинового буфера.
Буферы также бывают сложной формы, которая обеспечивает многоступенчатую характеристику. В начале сжатия буфера он сжимается по всей длине, потом узкие части смыкаются, и жесткость увеличивается ещё сильнее.
Естественно, при достижении буфера ходом подвески, плавность хода выходит за рамки комфорта.
Чем меньше и легче легковой автомобиль, тем сложнее добиться на нём хорошей плавности хода.
Чем автомобиль легче – тем мягче требуется пружина для обеспечения комфортной частоты колебаний. А чем мягче пружина – тем сильнее высота посадки автомобиля на подвеске зависит от его загрузки, а вместе с этим и кинематика подвески. А 4-5 не менее жирных задниц в него по любому нужно посадить.
И чем меньше автомобиль – тем как правило короче рычаги подвески, меньше радиусы по которым они работают и тем меньше допустима разница уровня. Поэтому, как правило, чем меньше и легче автомобиль – тем сильнее приходится приносить комфорт в жертву грузоподъёмности и кинематике.
Ситуацию может спасти только пневматическая или гидропневматическая повдески. С такими подвесками высота посадки кузова на подвеске не зависит от загрузки. Преимущество колоссальное! Но, это дорого и хлопотно и применяется только на автомобилях бизнес и премиум класса.
Стабилизатор поперечной устойчивости предназначен для увеличения угловой жесткости подвески. Угловая жесткость подвески – это жесткость сопротивления подвески крену кузова под действием центробежной силы. Необходимо это для двух целей. Во-первых, для того, чтобы положение рычагов подвески при крене в поворотах не выходило за предельно допустимые с точки зрения кинематики. Во-вторых, для обеспечения заданного соотношения угловых жесткостей, что нужно для управляемости, о которой я расскажу в соответствующей серии.
К сожалению, применение стабилизатора имеет негативный эффект на плавность хода. Когда автомобиль наезжает на препятствие обоими колёсами оси, стабилизатор на плавность хода не влияет. Однако, при наезде на препятствие одним колесом, суммарная жесткость складывается из жесткости пружины и жесткости стабилизатора.
Также существует поверие, что на плавность хода влияют шины. Я могу сказать так. Если ваши шины положительно повлияли на плавность хода, значит они либо спущены, либо по какой-то другой причине слишком сильно склонны к деформации, что означает повышенное сопротивление движению, расход топлива, плохую динамику и скорее всего сильный увод. Жесткость нормальной шины настолько высока в сравнении с жесткостью подвески автомобиля, что её влияние на плавность хода ничтожна.
И усилие амортизаторов тоже оказывает весьма косвенное влияние на плавность хода, кроме ситуаций, когда они начинают подклинивать от перегрева или наоборот застывания масла в них на адском морозе.
Уже лет 70 автопром мира ведёт исследования по активным подвескам, но по сей день, не существует ни одной серийной модели с ПОЛНОЦЕННОЙ активной подвеской.
В теории идея проста как всё гениальное: датчик перед колесом сканирует профиль дороги, а подвеска колесом обкатывает все неровности. Как результат – идеально гладкое движение кузова.
Даже ЗиЛ членовоз с такой подвеской испытывали ещё в 70-ых годах прошлого века.
Всё это очень красиво выглядит на рекламных роликах компаний, ведущих разработки.
Но, в реальности есть ряд проблем, пока мешающих активной подвеске стать серийным решением.
1) Огромные энергозатраты на работу исполнительных механизмов подвески.
2) Адекватность показаний датчиков при движении по уплотняемым опорным поверхностям. То есть, грунт или снег.
3) Отработка нештатных ситуаций, например занос.
4) Плохая информативность для водителя. Не чувствуется ни скорость, ни сцепление с дорогой.
Поэтому, по настоящее время, существуют только такие серийные варианты подобной подвески, которые могут быть притянуты к понятию «активной» подвески разве что за уши.
Чем и занимается маркетинг их производителей. То есть, в очень урезанном варианте.
Хотя, даже в урезанном варианте эта технология может давать неплохую прибавку плавности хода.
Естественно, всё это очень дорогие накрутки к стоимости владения автомобилем. Применение разумно только для премиум класса.
Подводя итог по плавности хода, можно сказать, что для коротких поездок по ровному асфальту подходит и маленький жесткий автомобиль, то есть например, если вы живёте в городе и работаете в офисе.
А вот для длинных поездок по плохим дорогам лучше иметь мягкий, большой и тяжелый. Это например, если вы живёте в деревне в нескольких десятках километров от города, в который часто ездите по делам, но туда ведёт разбитая дорога.
Но вообще говоря, учитывая наш климат, при котором дороги превращаются в адский танкодром после первой зимней оттепели, применение маленьких жестких автомобилей евроазиатского образца в нашей стране не кажется мне хорошей идеей.
9.1. Плавность хода и ее значение
Под
плавностью
хода
понимают
способность автомобиля двигаться в
различных условиях с возможно малыми
колебаниями кузова или грузовой
платформы, не утомляя пассажиров и
водителя, способствуя сохранности
грузов.
Возникающие в
процессе движения автомобиля колебания
(вибрации) тела человека оказывают
сложное биологическое воздействие на
его состояние, т.к. могут вызвать ряд
изменений в организме, влияющих на
функциональное состояние и уровень
работоспособности. При этом действие
вибрации на организм зависит от ее
частоты, амплитуды, направления и
продолжительности.
Колебания с частотой
до 3-5 Гц оказывают влияние на вестибулярный
аппарат человека и могут вызвать
«морскую» болезнь, т.е. укачивание.
Колебания с
частотами от 3-5 до 11 Гц вызывают
расстройства, обусловленные возбуждением
лабиринтного аппарата внутреннего уха
и резонансными колебаниями как
человеческого тела в целом, так и
некоторых его частей (головы, желудка,
печени и кишечника).
Колебания с
частотами 11 — 45 Гц могут вызывать
расстройства ряда внутренних органов,
ухудшение зрения и даже тошноту и рвоту.
Вибрации тела с
частотой свыше 45 Гц вызывают так
называемую вибрационную болезнь.
При взаимодействии
колес с неровностями дороги кузов и
колеса совершают сложные колебания,
которые оказывают значительное влияние
не только на пассажиров и груз, но и на
рабочие процессы в различных агрегатах
и механизмах самого автомобиля, что в
конечном счете отражается на его
эксплуатационных показателях. Установлено,
что при эксплуатации автомобилей на
неровных дорогах снижается средняя
скорость движения, уменьшается срок
службы автомобиля и его производительность,
возрастает расход топлива и износ шин;
увеличиваются затраты на техническое
обслуживание и ремонт. Поэтому плавность
хода рассматривается как одно из
важнейших эксплуатационных свойств
автомобиля.
Улучшение плавности
хода достигается оптимизацией ряда
конструктивных параметров самого
автомобиля и его подвески, а также за
счет подрессоривания кабины и сидения
водителей и пассажиров.
9.2. Измерители плавности хода
Плавность хода
оценивается с помощью нескольких
измерителей:
Период колебаний
Т – время, в течении которого кузов
совершает полное колебательное движение.
Угловая (циклическая)
частота колебаний:
=
2/Т.
(191)
В практике частоту
колебаний измеряют числом колебаний в
минуту:
n
= 60/Т = 60/2
= 30/![]()
,
(192)
где
m
– масса колеблющегося тела.
Амплитуда
колебаний Аmax
– наибольшее отклонение (перемещение)
кузова от положения равновесия
Скорость
колебаний Vк
– это первая производная перемещения
по времени.
Ускорение
колебаний — вторая производная перемещения
по времени или первая производная
скорости колебаний по времени, м/с2.
Скорость
нарастания ускорений колебаний – третья
производная перемещения по времени или
первая производная ускорения колебаний
по времени, м/с3.
9.3. Колебания автомобиля
Кузов
автомобиля имеет шесть степеней свободы
и совершает весьма различные колебания
(рис. 50.). Линейные перемещения вдоль
осей х и у: Sх
– подергивание, Sу
– шатание, Sz
– подпрыгивание, и угловые перемещения
вокруг этих осей х
– покачивание, у
– галопирование, z
– виляние.

Рис. 50. Основные виды
колебаний
Приведенная
жесткость подвески (сп)
складывается из жесткости упругих
элементов самой подвески (cр)
и жесткости пневматических шин (cш)
(рис. 51.).

Рис.
51. Определение приведенной жесткости
подвески
Под
влиянием веса Gп
упругая система деформируется на
величину, равную сумме прогибов подвески
и шины. Вместе с тем суммарный прогиб
этой системы, который определяют по
изменению положения оси колеса:
f
= Gп/спр,
(193)
где
спр
– приведенная жесткость подвески и
шины, Н/м.
Тогда
![]()
.
(194)
Решив полученное
равенство получим:
спр
=
![]()
.
(195)
Жесткость передней
или задней подвески современных
автомобилей находится в пределах 20 — 60
кН/м, а жесткость шин – в пределах 200 —
450 кН/м.
Для
уменьшения вертикальных колебаний
используют мягкую подвеску и устанавливают
амортизаторы. Чтобы иметь представление
о том, каким образом уменьшить
галопирование, познакомимся с понятием
о центре упругости системы /3/. Центром
упругости системы называют точку, при
приложении к которой внешней возмущающей
силы возникает только линейное перемещение
системы. Рассмотрим стержень, который
опирается на упругие элементы подвески
(рис. 52).
Если
сила Р приложена не к центру упругости,
то происходит линейное и угловое
перемещение стержня (положение 1). Если
сила Р приложена к центру упругости, то
происходит только линейное перемещение
стержня(положение 2). В последнем случае
f1
= f2,
вследствие чего
галопирование
отсутствует.

Рис. 52 Определение
положения центра упругости
Определим величину
х – расстояние от центра упругости до
центра тяжести из условия равновесия
стержня:
Мцт
= R1a
– Px
– R2b
= 0. (196)
Решив относительно
х, получим:
х
= (R1a
– R2b)/Р.
(197)
Заменим
реакции R1
и R2
произведениями R1
= с1f1
и R2
= с2f2,
следовательно Р = R1
+ R2,
откуда:
х
=
![]()
.
(198)
Но
по условию f1
= f2,
то:
х
=
![]()
.
(199)
Применим
данное выражение к колебаниям кузова,
заменив подрессоренную массу кузова
mк
тремя массами, связанными между собой
невесомым стержнем (рис. 53,б).
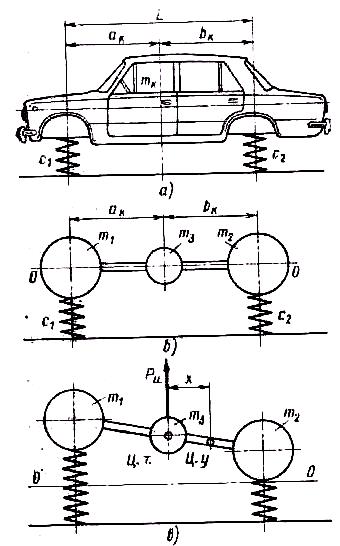
Рис. 53. Свободные
колебания кузова
Чтобы система
соответствовала в динамическом отношении
действительной массе подрессоренной
части автомобиля, необходимо соблюдение
следующих условий:
1.сумма всех масс
системы должна быть равна подрессоренной
массе автомобиля:
m1
+ m2
+ m3
= mк.
(200)
2.
центр тяжести системы должен совпадать
с центром тяжести кузова:
m1ак
= m2bк.
(201)
3.
момент инерции системы относительно
горизонтальной оси у должен равняться
моменту инерции подрессренной массе
авиомобиля относительно той же оси:
m1ак2
+ m2bк2
= I
= mкк2,
(202)
где
к
– радиус инерции подрессоренной массы
автомобиля.
Из
уравнений (200) – (202) определим массы m1,
m2,
m3:
m1
= (mкк2)/(акL);
(203)
m2
= (mкк2)/(bкL);
(204)
m3
= mк
.
(205)
Если стержень вывести из состояния
равновесия, а затем отпустить, то он
начнет колебаться (рис. 53,в). во время
колебаний появляется сила инерции:
Ри = m3j.
(206)
Она создает момент
относительно центра упругости:
Ми
= Рих
= m3jх.
(207)
Ми
= 0, если m3
= 0 или когда х = 0. Из уравнения следует,
что m3
= 0, если к2/(акbк)
= 1, т. к. mк
0.для легковых автомобилей отношение
к2/(акbк)
близко к единице, вследствии чего они
имеют хорошую плавность хода.
Если плечо х = 0 и
центр тяжести совпадает с центром
упругости, то:
х
=
![]()
= 0. (208)
тогда
с1ак
= с2bк
или с1/с2
= bк/ак.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Плавность хода автомобиля
Под плавностью хода автомобиля подразумевается его способность к поглощению толчков, ударов и вибраций, возникающих при движении. Плавность хода является важным эксплуатационным качеством, оказывающим влияние на самочувствие человека (пассажиров), сохранность перевозимых грузов, безопасность движения, долговечность машины. Плавность хода зависит от характера и величины возмущающих сил, вызывающих колебания, общей компоновки машины и отдельных ее конструктивных особенностей, главным образом от системы подрессоривания, а также от мастерства вождения.
Возмущающие силы могут возникать под действием внутренних и внешних причин. К внутренним причинам относятся неуравновешенность деталей и неравномерность их вращения. Из внешних причин наибольшее значение имеют неровности пути. Под влиянием внутренних причин возникают главным образом высокочастотные колебания – вибрации, влияние которых на пассажиров не столь значительно. Поэтому плавность хода рассматривается с точки зрения воздействия, оказываемого неровностями пути.
Влияние колебаний и вибраций на человека
При движении автомобиля его кузов испытывает колебания и вибрации, которые организм человека переносит по-разному. Колебания с низкой частотой (до 900…1100 кол/мин) воспринимаются человеком как отдельные циклы изменения нагрузки или положения. Колебания более высоких частот воспринимаются слитно и называются вибрациями. Частота колебаний кузова на рессорах лежит в пределах от 80 до 150 кол/мин, частота колебаний осей между рессорами и землей (шинами) равна 360-900 кол/мин. Вибрации двигателя, трансмиссии и кузова происходят с частотой 1000-4200 кол/мин.
Организм человека воспринимает вибрации или через их звуковые проявления или непосредственно как силовые воздейчтвия. В атомобиле пассажир изолирован от непосредственного силового воздействия вибрации подушками. Только ноги на полу могут воспринимать эти вибрации,силовые воздействия которых почти полностью устраняются применением упругих ковриков на полу. Наибольшее влияние на организм человека оказывают колебания кузова. Колебательный процесс характеризуется частотами, амплитудами, скоростью колебания, ускорениями и скоростью изменения ускоренияй.
Для повышения комфортабельности автомобиля необходимо по возможности уменьшить амплитуду колебаний. При амплитудах колебаний меньших 35-40 мм, амортизационная способность человеческого организма полностью устраняет колебания головы. Большие амплитуды вызывают колебания головы, что приводит к неприятным ощущениям и быстрой усталости.
Частота колебаний более существенно влияет на организм человека. Для установления частот, к которым привык человек, можно подсчитать число колебаний, испытываемых им при ходьбе.
Приняв шаг человека в среднем равным 0,75 м, получаем:
| Скорость пешехода в км/час | 3.0 | 3.5 | 4.0 | 4..5 | 5.0 |
| Число вертикальных колебаний в минуту |
Частота колебаний современных автомобилей, наиболее совершенных по качеству подвески, лежат в пределах очень близких к этим цифрам. Установлено, что снижение числа колебаний ниже 50 кол/мин часто вызывает у пассажиров явление «морской болезни», а превышение 130 кол/мин — приводит к ощущению резких толчков.
На ощущения человека при колебаниях – его энергетические затраты и нервные нагрузки – могут оказывать существенное влияния разные параметры колебательного процесса, в зависимости от частоты колебаний. При частотах до 4-6 кол/мин, в пределы которых полностью укладывается весь низкочастотный диапазон колебаний автомобиля, ощущения в первую очередь пропорциональны ускорениям при колебаниях. Поэтому для оценки плавности хода автомобилей наиболее распространенным измерителем являются вертикальные ускорения, определяемые в характерных точках колебательной системы. По величине вертикальных ускорений кузова автомобиля можно также судить о сохранности перевозимого груза.
Если ускорения кузова больше g = 9.81 м/с 2 , то незакрепленный груз отрывается от пола и затем падает обратно. При оценке плавности хода по ускорениям необходимо, кроме величины ускорений, учитывать их повторяемость. Совокупный учет этих факторов соответствует взглядам физиологов на утомление, как на явление, связанное с интенсивность и частотой внешних раздражителей. Следует отметить также, что при частотах колебаний кузова до 5-6 кол/мин на ощущения человека оказывает заметное влияние скорость ускорений, т.е. третья производная перемещений по времени. По данным профессора А.К. Бируля, скорости изменения ускорений до 25 м/с 2 вызывает беспокоящие ощущения, а при 40 м/с 2 – неприятные ощущения.
Исходя из указанных предпосылок, Я.И. Бронштейном предположена для практической оценки плавности хода автомобиля пятибалльная шкала, в которой соответствующий бал присваивается исходя из числа толчков и их интенсивности (величины максимальных ускорений), испытываемых автомобилем при прохождении в заданных дорожных условиях расстояние 1 км.
Таблица Шкала оценки плавности хода автомобиля
| Максимальные вертикальные ускорения м/с 2 | ||||||
| 2.0 | 2…3 | 3…5 | 5…7 | 7…10 | Больше 10 | |
| Допустимое число толчков | ||||||
| Отлично Хорошо Посредственно Неудовлетворительно Очень плохо | 15…20 25…30 — — — | 2…5 12…15 30…40 — — | — 1…2 10…12 — — | — — 0…1 | — — — 2…5 | — — — — |
Если, например, ускорения достигают значений 3-5 м/с 2 , то плавность хода признана хорошей при условии, что число соответствующих им толчков не больше чем 1-2 на км пути. Если при наличии таких же же максимальных ускорений число толчков будет 10-12, то плавность хода автомобиля на данной дороге может быть расценена как посредственная.
Динамика машин с упругими звеньями
С развитием техники все чаще возникает ситуация, когда использование простейших динамических моделей с жесткими звеньями становится неприемлемым и приходится обращаться к более сложным моделям, учитывающим упругость звеньев. Такое расчетное моделирование связано с интенсификацией технологических процессов и ростом рабочих скоростей машин, что приводит к увеличению уровня параметров колебательных явлений. Учет упругих свойств, звеньев используемых в машинах, позволяет решать новый класс динамических задач.
В современных условиях также большую роль приобретают экологические проблемы, сопутствующие работе машин, решение которых должно гарантировать надежную защиту людей (груза) от колебательных явлений и вибрации. Наконец с помощью упругих элементов машин удается рациональным образом формировать колебательные процессы, создаваемые внешними условиями движения машин по дорогам сложного профиля.
При учете упругости звеньев необходимо рассматривать все разновидности механических колебаний, а именно со свободными колебаниями возникающими за счет начальных условий (начальное отклонение от положения равновесия); вынужденными колебаниями под действием переменных вынуждающих сил, зависящих от времени; параметрические колебания, связанные с изменениями во времени инерционных и упругих характеристик; автоколебания, представляющие собой установившиеся колебательный процесс, поддерживаемый неколебательным источником энергии.
Характеристики упругих элементов и их приведение
Важной характеристикой любого упругого элемента при продольных деформациях является коэффициент жесткости С=|¶F/¶x|, где F – восстанавливающая сила, х = деформация. При крутильных деформациях С=|¶M/¶j|, где М — восстанавливающий момент, а j — угловая деформация. В первом случае коэффициент жесткости имеет размерность Н/м. а во втором — Н?м. Обратную величину е = С -1 называют коэффициентом податливости.
На рис. представлены типичные графики 1-3 восстанавливающей силы F(х), которым соответствуют графики С(х), показанные на рис б. Очевидно, что для линейной характеристики С = const. Вид функции С(х) определяется материалом и конструктивными особенностями упругого элемента. Так, например, в рабочем диапазоне напряжений металлы обычно подчиняются закону Гука (кривая 1), в то время как для резины более свойственна жесткая характеристика (кривая 2), а для многих полимеров – мягкая характеристика (кривая 3). Однако в конструкциях, состоящих только из металлических деталей, также возможно возникновение нелинейных восстанавливающих сил. В частности, это наблюдается при точечном или линейном контакте двух поверхностей, что характерно для элементов высших кинематических пар. В этом случае контактная жесткость увеличивается с ростом нагрузок.
Помимо перечисленных причин нарушение линейной характеристики восстанавливающей силы может произойти из-за использования специально выбранных нелинейных упругих элементов – конических пружин, нелинейных муфт, из-за подключения или отключения каких либо элементов кинематической цепи, наличие зазоров в кинематических парах, установки упоров, фиксаторов и других факторов.
Нередко, однако, нелинейные факторы в общем балансе жесткостей оказываются малосущественными. Кроме того, при исследовании малых колебаний, происходящих в окрестности некоторого равновесного состояния системы Х0, нелинейные упругие характеристики могут быть линеаризованы. Действительно, пусть Х = Х0 +?Х, где -?Х отвечает малым колебаниям около положения Х0 (см рис а). Тогда, разлагая функцию F(x0+?x) в ряд Тейлора, имеем
Ограничиваясь первыми двумя членами ряда, получаем, что
Это означает, что нелинейную характеристику в окрестности точки приближенно заменяем касательной в этой точке. Разумеется, чтобы такая замена была правомерной, необходимо, чтобы функция в окрестности точки была непрерывной и дифференцируемой. При нарушении этого условия упругие характеристики называют существенно нелинейными.
Заметим, что необходимость учета нелинейностей обычно связана с рассмотрением таких динамических процессов, при которых происходят значительные деформации упругих элементов, либо в тех случаях, когда целью исследования являются специфические эффекты, свойственные только нелинейным системам.
Приведение упругих характеристик, как правило, имеет своей целью упрощение модели и возможно лишь в том случае, когда деформации всех упругих элементов зависят от одной и той же обобщенной координаты.
Например. Задача приведения параллельно соединенных упругих элементов к одному упругому элементу Спр.
Отличительным свойством параллельного соединения является равенство абсолютных значений деформаций: |x1| = |x2| = |xn| = |x|.
При приведении не должен нарушаться баланс потенциальной энергии системы. Для одного элемента i при деформации xi восстанавливающая сила равна Fi = — ci?xi? Что отвечает потенциальной энергии
следовательно, приведенный коэффициент упругости имеет вид:
При последовательном соединении имеем равенство абсолютных значений сил |Fi|=|F|.
Аналогичным образом получаем приведенную податливость (епр) системы упругих элементов:
При параллельном соединении определяющую роль деформационного смещения играют наиболее жесткие элементы, а при последовательном соединении – наиболее податливые элементы.
Теорема Лагранжа-Дирихле. Если система, находящаяся в консервативном силовом поле и подчиненная голономным идеальным и стационарным связям имеет в положении равновесия min потенциальной энергии, то это положение является устойчивым.
Представление кинетической и потенциальной энергии в виде квадратичных форм:
Где Aik— инерционный коэффициент;
Cik— квазиупругий коэффициент;
Н – число степеней свободы механической системы;
qi, qk – число обобщенных координат.
Модель расчета движения платформы автомобиля с упругими элементами (рессорами) — определение условий комфортности перемещения пассажиров или груза.
1. Число степеней свободы платформы автомобиля в плоской системе координат: подпрыгивание, галопирование. Платформа имеет два независимых перемещения Н =2.
2. Выбор обобщенных координат:
q1 – подпрыгивание, перемещение центра масс платформы вдоль оси Z; q1 = Z.
q2 – галопирование, вращение платформы вокруг центра масс; q2 = j.
Координаты состояния краевых точек платформы автомобиля вдоль оси Z:
3.Кинетическая энергия механической системы (платформы автомобиля при движении с упругими элементами):
Инерционные коэффициенты определятся из уравнения кинетической энергии а11 = m; а22 = J; а12 = 0.
4. Потенциальная энергия механической системы (платформа автомобиля при движении с упругими элементами):
Слагаемое приведенного уравнения определяется как коэффициент жесткости упругого элемента умноженного на квадрат деформации.
Подставляя координаты, состояния крайних точек платформы автомобиля, получаем уравнение состояния квадратичной формы потенциальной энергии:
Производим расчет уравнения. Возводим в квадрат. Раскрываем скобки и группируем коэффициенты по номерам обобщенных координат. Полученные значения определяют требуемые коэффициенты жесткости.
5. Работа на возможном перемещении платформы при движении с упругими элементами (рессорами):
Из уравнения оцениваем значения обобщенной силы для поступательного движения и вращательного движения:
Состояние механической системы платформы в форме дифференциальных уравнений Лагранжа для поступательного и вращательного движения имеет вид:
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
9. Плавность хода
Под плавностью хода понимают способность автомобиля двигаться в различных условиях с возможно малыми колебаниями кузова или грузовой платформы, не утомляя пассажиров и водителя, способствуя сохранности грузов.
Возникающие в процессе движения автомобиля колебания (вибрации) тела человека оказывают сложное биологическое воздействие на его состояние, т.к. могут вызвать ряд изменений в организме, влияющих на функциональное состояние и уровень работоспособности. При этом действие вибрации на организм зависит от ее частоты, амплитуды, направления и продолжительности.
Колебания с частотой до 3-5 Гц оказывают влияние на вестибулярный аппарат человека и могут вызвать «морскую» болезнь, т.е. укачивание.
Колебания с частотами от 3-5 до 11 Гц вызывают расстройства, обусловленные возбуждением лабиринтного аппарата внутреннего уха и резонансными колебаниями как человеческого тела в целом, так и некоторых его частей (головы, желудка, печени и кишечника).
Колебания с частотами 11 — 45 Гц могут вызывать расстройства ряда внутренних органов, ухудшение зрения и даже тошноту и рвоту.
Вибрации тела с частотой свыше 45 Гц вызывают так называемую вибрационную болезнь.
При взаимодействии колес с неровностями дороги кузов и колеса совершают сложные колебания, которые оказывают значительное влияние не только на пассажиров и груз, но и на рабочие процессы в различных агрегатах и механизмах самого автомобиля, что в конечном счете отражается на его эксплуатационных показателях. Установлено, что при эксплуатации автомобилей на неровных дорогах снижается средняя скорость движения, уменьшается срок службы автомобиля и его производительность, возрастает расход топлива и износ шин; увеличиваются затраты на техническое обслуживание и ремонт. Поэтому плавность хода рассматривается как одно из важнейших эксплуатационных свойств автомобиля.
Улучшение плавности хода достигается оптимизацией ряда конструктивных параметров самого автомобиля и его подвески, а также за счет подрессоривания кабины и сидения водителей и пассажиров.
9.2. Измерители плавности хода
Плавность хода оценивается с помощью нескольких измерителей:
Период колебаний Т – время, в течении которого кузов совершает полное колебательное движение.
Угловая (циклическая) частота колебаний:
В практике частоту колебаний измеряют числом колебаний в минуту:
n = 60/Т = 60/2 = 30/ , (192)
где m – масса колеблющегося тела.
Амплитуда колебаний Аmax – наибольшее отклонение (перемещение) кузова от положения равновесия
Скорость колебаний Vк – это первая производная перемещения по времени.
Ускорение колебаний — вторая производная перемещения по времени или первая производная скорости колебаний по времени, м/с 2 .
Скорость нарастания ускорений колебаний – третья производная перемещения по времени или первая производная ускорения колебаний по времени, м/с 3 .
9.3. Колебания автомобиля
Кузов автомобиля имеет шесть степеней свободы и совершает весьма различные колебания (рис. 50.). Линейные перемещения вдоль осей х и у: Sх – подергивание, Sу – шатание, Sz – подпрыгивание, и угловые перемещения вокруг этих осей х – покачивание, у – галопирование, z – виляние.
Рис. 50. Основные виды колебаний
Приведенная жесткость подвески (сп) складывается из жесткости упругих элементов самой подвески (cр) и жесткости пневматических шин (cш) (рис. 51.).
Рис. 51. Определение приведенной жесткости подвески
Под влиянием веса Gп упругая система деформируется на величину, равную сумме прогибов подвески и шины. Вместе с тем суммарный прогиб этой системы, который определяют по изменению положения оси колеса:
где спр – приведенная жесткость подвески и шины, Н/м.
Решив полученное равенство получим:
Жесткость передней или задней подвески современных автомобилей находится в пределах 20 — 60 кН/м, а жесткость шин – в пределах 200 — 450 кН/м.
Для уменьшения вертикальных колебаний используют мягкую подвеску и устанавливают амортизаторы. Чтобы иметь представление о том, каким образом уменьшить галопирование, познакомимся с понятием о центре упругости системы /3/. Центром упругости системы называют точку, при приложении к которой внешней возмущающей силы возникает только линейное перемещение системы. Рассмотрим стержень, который опирается на упругие элементы подвески (рис. 52).
Если сила Р приложена не к центру упругости, то происходит линейное и угловое перемещение стержня (положение 1). Если сила Р приложена к центру упругости, то происходит только линейное перемещение стержня(положение 2). В последнем случае f1 = f2, вследствие чего
Рис. 52 Определение положения центра упругости
Определим величину х – расстояние от центра упругости до центра тяжести из условия равновесия стержня:
Решив относительно х, получим:
Применим данное выражение к колебаниям кузова, заменив подрессоренную массу кузова mк тремя массами, связанными между собой невесомым стержнем (рис. 53,б).
Рис. 53. Свободные колебания кузова
Чтобы система соответствовала в динамическом отношении действительной массе подрессоренной части автомобиля, необходимо соблюдение следующих условий:
1.сумма всех масс системы должна быть равна подрессоренной массе автомобиля:
2. центр тяжести системы должен совпадать с центром тяжести кузова:
3. момент инерции системы относительно горизонтальной оси у должен равняться моменту инерции подрессренной массе авиомобиля относительно той же оси:
где к – радиус инерции подрессоренной массы автомобиля.
Из уравнений (200) – (202) определим массы m1, m2, m3:
Если стержень вывести из состояния равновесия, а затем отпустить, то он начнет колебаться (рис. 53,в). во время колебаний появляется сила инерции:
Она создает момент относительно центра упругости:
Ми = 0, если m3 = 0 или когда х = 0. Из уравнения следует, что m3 = 0, если к 2 /(акbк) = 1, т. к. mк 0.для легковых автомобилей отношение к 2 /(акbк) близко к единице, вследствии чего они имеют хорошую плавность хода.
Устройство автомобилей
Автомобиль является сухопутным транспортным средством, поэтому перемещается по дорогам с различным покрытием и разного качества. При этом поездка по неровной дороге на одном автомобиле не вызывает неприятных ощущений, а даже непродолжительная езда на другом автомобиле по той же дороге вызывает неприятные ощущения, приводит к быстрой утомляемости и даже расстройствам здоровья.
В данном случае можно сказать, что первый автомобиль обладает плавным ходом, а второй, обладая жестким ходом, передает все неровности дороги от колес и подвески непосредственно кузову, водителю и пассажирам.
Под плавностью хода понимают совокупность свойств, обеспечивающих ограничение в пределах установленных норм вибронагруженности водителя, пассажиров, груза и автомобиля.
Нормы вибронагруженности устанавливаются так, чтобы на дорогах, для которых предназначен данный автомобиль, вибрации не вызывали у водителя и пассажиров неприятных ощущений, а вибрации грузов и автомобиля – их повреждений.
Выступы и впадины, имеющие длины волн от 100 м до 10 см называют микропрофилем дороги . Он является основным источником сил, вызывающих колебания автомобиля на подвеске.
Мелкие неровности дорожной поверхности с длиной волн менее 10 см называют шероховатостью дороги . Они могут стать причиной высокочастотной вибрации и связанного с ней шума высокого уровня при движении транспортного средства.
Плавность хода зависит от характера и величины возмущающих сил, вызывающих колебания, общей компоновки автомобиля и отдельных его конструктивных особенностей, главным образом от системы подрессоривания, а также от мастерства водителя.
Возмущающие силы могут возникать под действием внутренних и внешних причин. К внутренним причинам относятся неуравновешенность деталей и неравномерность их вращения. Внутренние возмущающие факторы может вызывать дисбаланс работающего двигателя, узлов и деталей трансмиссии, ходовой части, в т. ч. колес. Из внешних причин наибольшее значение имеют неровности пути.
Под влиянием внутренних причин возникают главным образом высокочастотные колебания – вибрации, влияние которых на пассажиров не столь значительно. Конечно, сильный дисбаланс колес или, например, гнутый карданный вал, могут вызвать ощутимую тряску при движении, но эти случаи связаны с явной неисправностью элементов конструкции автомобиля. Поэтому плавность хода рассматривается с точки зрения воздействия, оказываемого неровностями пути.
Основными устройствами, защищающими автомобиль, водителя, пассажиров и груз от большой вибронагруженности со стороны дороги является подвеска и шины, а для пассажиров и водителя также упругие сидения.
На человека негативно влияет амплитуда, частота и ускорение колебательного движения. Колебания кузова автомобиля складываются из вынужденных колебаний, имеющих случайно меняющиеся частоты, и свободных колебаний, имеющих постоянную частоту (собственная частота колебаний кузова).
Свободные колебания преобладают над вынужденными, поэтому снижение интенсивности колебаний с собственной частотой приводит к улучшению плавности хода автомобиля на любой дороге.
Влияние колебаний и вибраций на человека
При движении автомобиля его кузов испытывает колебания и вибрации, которые организм человека переносит по-разному. Колебания с низкой частотой (до 900…1100 колебаний в минуту) воспринимаются человеком как отдельные циклы изменения нагрузки или положения. Колебания более высоких частот воспринимаются слитно и называются вибрациями.
Частота колебаний кузова на рессорах лежит в пределах от 80 до 150 колебаний в минуту, частота колебаний осей между рессорами и землей (шинами) равна 360. 900 колебаний в минуту. Вибрации двигателя, трансмиссии и кузова происходят с частотой 1000. 4200 колебаний в минуту.
Организм человека воспринимает вибрации или через их звуковые проявления или непосредственно как силовые воздействия. В автомобиле пассажиры и водитель изолированы от непосредственного силового воздействия вибрации подушками сидений. Только ноги на полу могут воспринимать эти вибрации, силовые воздействия которых почти полностью устраняются применением упругих ковриков.
Наибольшее влияние на организм человека оказывают колебания кузова.
Колебательный процесс характеризуется частотами, амплитудами, скоростью колебания, ускорениями и скоростью изменения ускорений.
Для повышения комфортабельности автомобиля необходимо по возможности уменьшить амплитуду колебаний. При амплитудах колебаний меньших 35…40 мм, амортизационная способность человеческого организма полностью устраняет колебания головы. Большие амплитуды вызывают колебания головы, что приводит к неприятным ощущениям и быстрой усталости.
Частота колебаний более существенно влияет на организм человека. Установлено, что снижение числа колебаний менее 50 колебаний в минуту часто вызывает у пассажиров явление «морской болезни», а превышение 130 колебаний в минуту приводит к ощущению резких толчков.
На ощущения человека при колебаниях – его энергетические затраты и нервные нагрузки – могут оказывать существенное влияния разные параметры колебательного процесса, в зависимости от частоты колебаний.
При частотах до 4..6 колебаний в минуту, в пределы которых полностью укладывается весь низкочастотный диапазон колебаний автомобиля, ощущения в первую очередь пропорциональны ускорениям при колебаниях. Поэтому для оценки плавности хода автомобилей наиболее распространенным измерителем являются вертикальные ускорения, определяемые в характерных точках колебательной системы. По величине вертикальных ускорений кузова автомобиля можно также судить о сохранности перевозимого груза.
Если ускорения кузова больше ускорения свободного падения g = 9,81 м/с 2 , то незакрепленный груз отрывается от пола и затем падает обратно, поскольку некоторое время находится в состоянии невесомости.
При оценке плавности хода по ускорениям необходимо, кроме величины ускорений, учитывать их повторяемость. Совокупный учет этих факторов соответствует взглядам физиологов на утомление, как на явление, связанное с интенсивность и частотой внешних раздражителей.
Следует отметить также, что при частотах колебаний кузова до 5…6 колебаний в минуту на ощущения человека оказывает заметное влияние скорость ускорений, т.е. третья производная перемещений по времени. Так, например, скорости изменения ускорений до 25 м/с 2 вызывают беспокоящие ощущения, а при 40 м/с 2 – неприятные ощущения.
Показатели плавности хода
Колебания кузова автомобиля характеризуются следующими показателями:
- период колебаний t – время, в течение которого кузов совершает полное колебательное движение;
- угловая частота Ω – величина, численно равная произведению частоты колебаний на 2 π : Ω = 2 πυ = 2 π/t .
Угловая частота соответствует фазе колебаний без начальной фазы в момент времени t = 1 сек.
Частота колебаний n – число колебаний в минуту:
n = 60 /t = 60 Ω/ 2 π = 30/π √( с/m ),
где m – масса тела;
с – жесткость упругого элемента подвески.
Деформация f0 упругого элемента подвески при ее статическом положении зависит от его жесткости и силы тяжести подрессоренной массы автомобиля:
где Gг – вес подрессоренной массы автомобиля.
Тогда можно записать:
Анализируя эту формулу можно сделать вывод, что чем больше статический прогиб подвески, тем меньше частота собственных колебаний. Используя мягкие подвески, уменьшают частоту собственных колебаний кузова, повышая комфортабельность автомобиля.
Что такое плавность хода автомобиля
Одно из самых главных потребительских качеств автомобиля — это плавность хода.
Давайте приведу пример.
Допустим, Вы очень устали, много работали, ночь не спали и прочее. Вы хотите полежать, отдохнуть, а если получится, то и поспать.
Но вокруг Вас раздражители.
Шум вокруг Вас — если очень устал, то полежать в шуме можно, а если шум равномерный, то можно и уснуть. Холодно, жарко – тоже можно пережить. Тесно – не вопрос, можно свернутся калачиком.
Но вот если Ваше ложе будет трясти, если в Вашу кровать будут врезаться, например, бегающие вокруг дети – отдохнуть никак не получится.
Так же и с автомобилем. Если у него плохая шумка, то Вы от перемещения на нем устанете, но не сильно. Тем более, что большинство автолюбителей все равно включают радио в машине, так что некоторый фоновый шум все равно присутствует. Бывают машины без кондиционеров, со слабыми печками, бывают и откровенно тесные автомобили.
Но главное причина усталости от дороги – тряска. И соответственно главное качество автомобиля – плавность хода.
Главным оно становится, если Вы ездите много, скажем от 50 км в день. Если поездки Ваши короткие, например 10-15 км в день, то плавность хода не так и важна.
От чего зависит плавность хода автомобиля?
В первую очередь она зависит от базы автомобиля, расстояния между его осями:
Поэтому у американцев, когда еще бензин стоил очень дешево, в почете были длинные и большие автомобили, длиной от 5 метров.
Да и сейчас там Тойота Камри, например, это среднеразмерный семейный седан. В почете семейные седаны и побольше — та же Тойота Авалон.
В США ездят много, живут часто загородом, и 50 км в день для них – запросто.
Если Вы хотите машину с хорошей плавностью хода, то придется покупать машину относительно большую и длинную. Короткие, небольшие автомобили конструктивно не могут быть мягкими и комфортными.
Во вторую очередь плавность хода зависит от конструкции подвески.
Можно сделать подвеску мягкую, хорошо отрабатывающую неровности и обеспечивающую хорошую плавность хода.
Но машина с такой подвеской будет крениться в поворотах, в ее рулевом управление будет чувствоваться некоторая «резиновость», рулиться такая машина четко не будет.
И соответственно, если сделать подвеску без кренов и с точным управлением, то такая машина будет жесткой, со слабой плавностью хода.
Т.е управляемость и плавность хода — это антагонисты, либо одно, либо другое.
Есть подвески, которые обеспечивают и хорошую плавность хода, и хорошую управляемость. Но они конструктивно очень сложны – пневмобаллоны, регулируемая жесткость амортизаторов, множество рычагов в подвеске. Такую конструкцию используют только в дорогих машинах премиум-класса, и такая подвеска недолго служит – часто на российских дорогах ее приходится перебирать раз в 50 000 км.
И все равно в такой подвеске есть несколько режимов, среди которых водитель должен выбирать. Нужен ему комфорт – переводит подвеску в режим «Комфорт», нужна хорошая управляемость – переводит подвеску в режим «Спорт».
Т.е. все равно и управляемость, и плавность хода одновременно получить невозможно.
На плавность хода также влияют покрышки, которые установлены на машину. Покрышки с низким профилем (небольшое расстояние между ободом диска и поверхность дороги) – обеспечивают хорошую управляемость и плохую плавность хода. И наоборот, высокопрофильные покрышки — мягкие, но машина на них плохо управляется. По сути, покрышки тоже можно отнести к конструкции подвески автомобиля.
Если Вам нужна хорошая плавность хода, то придется покупать длинную машину в любом случае. А с подвеской есть варианты – либо покупать машину дорогую со сложной подвеской – тогда и плавность хода будет хорошей, и управляемость. Либо жертвовать управляемостью и получать мягкую и долговечную подвеску.
Если говорить о марках, то все премиальные марки (БМВ, Меседес, легковые Лексусы, Ауди, частично Фольцваген) имеют сложную подвеску, которая имеет и хорошую управляемость, и хорошую плавность хода.
Европейские непремиальные марки (Опель, Шкода, Французы, Итальянцы) имеют уклон в сторону управляемости, и соответственно плавность хода у них неважная.
Японские и американские марки, как правило, имеют хорошую плавность хода, но неважную управляемость.