Введение
Гироскопы — это устройства, которые измеряют угловую скорость (angular rate) вращающегося объекта. В автомобильных применениях гироскопы используются для измерения скорости вращения автомобиля теоретически относительно трех осей: вертикальной (yaw), поперечной (pitch) или продольной (roll), но наиболее обычными из них являются yaw (yaw rate sensor) и roll (angular rate gyros) типы гироскопов.
Ключевые автомобильные применения, для которых разрабатываются новые гироскопы, это:
- Обнаружение крена машины и боковых опрокидываний (Rollover).
- Навигационные системы (GPS и другие).
- Контроль динамики автомобиля ESC, а также АБС.
- IMU.
В автомобильных системах безопасности и комфорта автомобилей класса high-end также востребованы гироскопы, мигрирующие, например, от потребительских применений — таких как контроль многих входных данных и стабилизация видеокамер. Гироскопы могут применяться, например, и для корректировки высоты и стабильности подвески в зависимости от угловой скорости крена (roll) автомобиля.
MEMS-гироскопы играют все более увеличивающуюся роль в автомобильных применениях, и рынок не ограничивается автомобильными применениями. Мировой рынок MEMS-гироскопов, согласно прогнозам, достигнет $800 млн уже в 2010 году.
Гироскопы классифицируются как в зависимости от применения, так и по их исполнениям: инерциальные (inertialgrade), тактические (tactical-grade) и показателя скорости (rate-grade devices).
В автомобиле преобладают гироскопы скорости вращения. Типичные автомобильные применения включают диапазон полной шкалы в 50–300°/с и разрешение в 0,5–0,05°/с в полосе пропускания менее 100 Гц, в зависимости от применения. Стандартная рабочая температура от –40 до +85 °C.
Многие современные типы автомобильных гироскопических устройств представляют собой вибрационные кориолисовы гироскопы, в которых для определения вращения используется вибрирующий механический элемент [1–18].
В более ранних устройствах для совершения колебаний использовался макроскопический пьезоэлектрический кристалл кварца. По мере развития MEMS-технологий колебательные функции все чаще выполняет кремниевый кристалл, совместимый с технологиями ИС, включающими схемы обработки сигнала и различные интерфейсы.
Основные технологии, реализуемые в современных гироскопах, включают:
- камертонные гироскопы Tuning Fork Gyroscope;
- вибрирующее колесо — гироскоп Vibrating Wheel;
- полусферические резонансные гироскопы Wine Glass Resonator Gyroscopes;
- кольцевой резонатор — гироскоп Ring Resonator Gyroscopes;
- вращающееся колесо — гироскоп Spinning Wheel Gyroscope;
- лазерные гироскопы;
- волоконно-оптические гироскопы;
- микрооптические электромеханические гиросистемы Micro-Optical-Electromechanical Systems (MOEMS) Gyros;
- интерферометрические MOEMS-гироскопы.
Теория, основные рабочие принципы и технологии гироскопов
Макро-гироскопы
Традиционные вращающиеся гироскопы, известные более 200 лет, действуют на основе следующего принципа: если вращающийся объект наклонить перпендикулярно к направлению вращения, то он будет иметь прецессию. Это означает, что если прикладывать к гироскопу постоянную внешнюю силу, то он начнет поворачиваться вокруг третьей оси, не совпадающей по направлению с основной осью вращения ротора. Прецессия, величина которой пропорциональна величине действующей силы, удерживает устройство, ориентированное в вертикальном направлении, причем может быть измерен угол наклона относительно опорной поверхности. Однажды раскрученное устройство стремится сопротивляться изменениям в его ориентации вследствие углового момента. Этот эффект известен в физике как гироскопическаяинерция. В случае прекращения внешнего воздействия прецессия мгновенно заканчивается, но ротор продолжает вращаться.
Основным элементом гироскопа является ротор spinning wheel, размещенный на вращающейся оси (рис. 1). Ротор гироскопа характеризуется тремя степенями свободы (три оси возможного вращения), которые обеспечиваются двумя рамками карданного подвеса. Ротор закреплен во внутреннем карданном подвесе или кольце, имеющем возможность колебаний во внешнем карданном подвесе, который, в свою очередь, может совершать колебания относительно опоры. Внешний подвес закреплен так, что возможно вращение вокруг одной оси в его собственном плане (одна степень свободы), при этом его ось вращения не имеет ни одной степени свободы. Внутренний подвес закреплен во внешнем подвесе так, что может осуществлять вращение вокруг одной оси в собственном плане, причем эта ось всегда нормальна к оси вращения ротора.

Таким образом, внутренний подвес обладает двумя степенями угловой свободы, его ось также обладает одной степенью свободы. Следовательно, ротор обладает тремя степенями угловой свободы, его ось — двумя. Ротор реагирует на силу, приложенную к входной оси, силой реакции вокруг выходной оси, то есть, если на такое устройство не действуют внешние возмущения, ось собственного вращения ротора сохраняет постоянную пространственную ориентацию в пространстве, но под действием момента внешней силы, стремящегося повернуть ось собственного вращения (например, при наклоне гироскопа), ось начинает вращаться, причем не вокруг направления момента, а вокруг оси, перпендикулярной ему (прецессия — движение, ортогональное направлению наклона). Для устранения многочисленных факторов ошибок в гироскопах используется фиксирование осей пружинами — тогда напряжение пружины будет пропорционально скорости прецессии.
Гироскоп может указывать угол поворота относительно основания, на котором он закреплен, а также угловую скорость. Из-за этих своих свойств гироскоп может применяться в автоэлектронике как датчик угла поворота или угловой скорости.
Оптические гироскопы — следующий тип гироскопических устройств, основанные на том, что лазерный луч многократно отражается в замкнутом контуре, при вращении которого длительность между моментом излучения и получения сигнала будет различной. Оптические гироскопы представляют собой различные модификации интерферометров Сагнака (Sagnac). (Эффект Сагнака состоит в явлении кольцевой интерферометрии. Принцип действия этих устройств основан на том, что два луча посылаются вокруг кругового пути в противоположных направлениях и, в зависимости от угловой скорости вращения пути, интерферометрическим детектором может быть обнаружен фазовый сдвиг, так как скорость света почти всегда остается постоянной).
В лазерных гироскопах RLG (Ring Laser Gyro), получивших применение приблизительно в 1960-х годах, кольцевой путь луча обеспечивается зеркалами. Обычно кольца представляют собой треугольники или прямоугольники с зеркалами на каждом углу.
Теория работы гироскопов дизайна Ring Laser показана на рис. 2. Простейший лазерный гироскоп представляет собой даже не кольцо, а треугольник. Лазерный источник выводит два луча, направленных в противоположных направлениях вокруг кольца, до момента достижения ими детектора. Детектор считает частоту биений комбинированной световой волны, которая прямо пропорциональна углу поворота гироскопа.

Два главных источника погрешностей кольцевых лазерных гироскопов — смещение и мертвая зона на малых углах. Смещение является следствием различных коэффициентов преломления пар лучей.
В FOG (Fiber Optic Gyro) путь лазера обеспечивается посредством оптоволокна. Волоконно-оптический гироскоп также использует интерференцию света, для того чтобы обнаруживать механическое вращение. Датчик представляет собой катушку оптоволокна, по которой два луча направляются в противоположные стороны и, согласно эффекту Сагнака, луч, путь которого лежит против вращения, проходит меньшее расстояние, что вызывает интерференцию лучей на детекторе, пропорциональную угловой скорости.
FOG показывают более высокое разрешение и более высокую точность, чем RLG, но и более высокий дрейф, а также чувствительность к поперечной вибрации, ускорению и ударам.
Преимущества оптических гироскопов по сравнению с вращающейся массой состоят в отсутствии инерции, бесконтактности (хотя лазерный луч и оптоволокно характеризуются не бесконечным сроком службы), большей гибкости, большей надежности, а также в меньшем размере и весе.
В настоящее время интенсивно развиваются оптические MEMS, и это касается всех сфер применения, в том числе и гироскопов. Многие компании сфокусировали свои разработки на построении массивов объемных кремниевых микромеханических зеркал и их интеграции с обрабатывающей и управляющей электроникой [1]. Перспективы этих устройств для автоэлектроники значительны, и, по мере коммерциализации технологий, будут обсуждаться в дальнейшем.
Кориолисовы вибрационные гироскопы
Принцип работы вибрационных кориолисовых гироскопов основан на том, что вращающийся вибрационный элемент (вибрационный резонатор) подвержен эффекту Кориолиса, состоящему в том, что вызывается вторичная вибрация, ортогональная оригинальному направлению вибрации. Детектирование параметров вторичной вибрации позволяет определять угловую скорость.
Эффект Кориолиса может быть понятно объяснен при помощи рис. 3 [2]. При вращении вибрирующей плоскости возникает ускорение (или сила) Кориолиса, пропорциональное скорости вращения. Объект, размещенный на вращающейся платформе радиусом r и перемещаемый вместе с платформой с угловой скоростью ω, характеризуется тангенциальной скоростью ωr относительно Земли. Объект, приближенный к центру, отличается значительно меньшей тангенциальной скоростью, чем объект, размещенный ближе к краю платформы в результате его перемещения в радиальном направлении. Скорость увеличения тангенциальной скорости, вызванная радиальной скоростью ?, представляет собой ускорение Кориолиса.

Если r изменяется вместе со скоростью ?, тангенциальное ускорение Кориолиса составит 2ω?. При наличии массы объекта M платформа должна прикладывать силу реакцию опоры 2Mω?.
В вибрационных гироскопах вместо подвижного объекта используется резонирующая масса, размещаемая на вращающейся платформе. Для того чтобы измерять ускорение Кориолиса, которое испытывают масса и фрейм и вследствие этого оба перемещаются в сторону на 90° от вибрационного движения, фрейм с резонирующей массой прикрепляется к подложке посредством пружин, размещенных также ортогонально к резонансному движению. Для измерения ускорения Кориолиса часто используются пальцеобразные конденсаторные обкладки (рис. 3б). Если пружины характеризуются жесткостью K, перемещение относительно фрейма составит 2 ω?M/K. При увеличении скорости вращения ? увеличивается и перемещение массы, и сигнал формируется на основе соответствующего емкостного изменения.
Гироскоп может находиться в любом положении относительно вращающегося объекта, но его сенсорная ось должна быть тангенциальна направлению вращения.
Камертонные гироскопы
Микромеханические гироскопы дизайна tuning fork впервые были разработаны Charles Stark Draper Laboratory в 1991–1993 годах (рис. 4).

Tuning Fork Gyroscope — это устройства, в которых две кремниевые массы совершают колебания равной амплитуды, но в противоположном направлении. При вращении сила Кориолиса создает ортогональную вибрацию, которая может измеряться различными средствами, образуя сигнал, пропорциональный смещению от плоскости.
Физическая модель эквивалентна двум зубцам камертона, связанным посредством соединительной балки, которые резонируют с определенной амплитудой. Когда зубцы вращаются, сила Кориолиса действует как сила, перпендикулярная проекциям зубцов в плоскости камертона, которая обнаруживается как поворот или скручивание (рис. 4а). Данная сила пропорциональна приложенной угловой скорости.
Гироскоп Charles Stark Draper Laboratory использует пальцеобразные емкостные электродные структуры — для того чтобы вводить камертон в резонанс и осуществлять его вращение вокруг любой оси в плоскости ИС (рис. 4в). Помимо емкостного, могут быть использованы также электростатические, электромагнитные, пьезоэлектрические или пьезорезистивные измерительные принципы.
Первый гироскоп Charles Stark Draper Laboratory разрешением 4000°/ч и дрейфом в 1°/ч был разработан именно для автомобильной промышленности и применялся для контроля проскальзывания в АБС. Затем характеристики гироскопов tuning fork были улучшены. В 1994 году было достигнуто разрешение 500°/ч, в 1997 году — 100°/ч. Стабильность дрейфа достигла величины 0,1°/ч. При этом также были значительно снижены шумы и повышен SNR [3].
Технологию Draper’s Tuning Fork в свое время приобрела корпорация Honeywell — для того, чтобы применять ее вместо своих лазерных гироскопов.
В настоящее время дизайн tuning fork — один из наиболее популярных и успешных MEMS-дизайнов, его используют такие ведущие компании, как Analog Devices, Bosch, Melexis, Systron Donner или Matsushita.
Гироскопы дизайна Vibrating-Wheel
Гироскоп Vibrating-Wheel включает колесо, которое вибрирует вокруг своей оси симметрии. Вращение в плоскости образует наклон колеса, который определяется, например, емкостными электродами (рис. 5а).

Этот дизайн позволяет определять две оси вращения с одним вибрирующим колесом. Поверхностный микромеханический поликремниевый гироскоп дизайна vibrating wheel gyro впервые был разработан U.C. Berkeley Sensors and Actuators Center (рис. 5б). В настоящем эта технология используется компанией Bosch.
Гироскопы дизайна Wine Glass Resonator
Гироскопы дизайна Wine Glass Resonator изготавливаются из расплавленного кремнезема и известны также как полусферические резонансные гироскопы hemispherical resonant gyro. Исследователи Мичиганского университета (University of Michigan) разработали различные модификации кольцевого резонирующего гироскопа resonant ring gyros в планарной форме. В гироскопе wine glass gyro резонансное кольцо (resonant ring) вводится в резонанс, и положения узловых точек индицируют угол вращения. В настоящее время аналогичные исследования проводят ученые Калифорнийского университета (University of California), также заинтересованные в приобретении ведущих позиций в области MEMS-гироскопов [4–7].
Технология vibratory ring лежит в основе коммерчески доступных гироскопов Silicon Sensing Systems.
Помимо рассмотренных выше основных типов MEMS-гироскопов разрабатываются и некоторые другие типы устройств, одно из которых описано в [3].
Пьезоэлектрический гироскоп Piezoelectric Plate Gyroscope
Данный тип гироскопов использует в качестве основы плату из материала PZT [3]. Пьезоэлектрический гироскоп функционирует подобно многим другим вибрационным MEMS-гироскопам, причем вибрирующим телом в данном случае служит пьезоэлектрический лист из материала PZT, характеризующийся длиной и шириной, много большей, чем ее высота. Вибрация листа осуществляется в направлении толщины материала, что требует переменного напряжения, прилагаемого поперек пластины. Когда вибрирующая плата вращается вокруг оси, перпендикулярной управляющему напряжению, наводится напряжение в третьем ортогональном направлении, пропорциональное угловой скорости.
Используемый в прошлом для построения макроустройств, достаточно простой по сравнению с гироскопами fork или ring-типов, рассматриваемый дизайн легко реализуем и на микроуровнях. Преимущество перед обычными вибрационными гироскопами состоит в том, что для получения читаемого выхода требуется много меньшее управляющее напряжение. Электрические выводы подсоединяются к 6 сторонам образца материала и локализуются в верхней части тонкой мембраны над полостью в кремниевой подложке. Полость придает больше свободы пластине PZT для вибрации и деформирования. Выводы обеспечивают управляющее напряжение и измерение выходного сигнала.
Так как пластина характеризуется x–y-симметрией, одиночная пластина может измерять вращение в двух направлениях. Тем не менее ее чувствительность составляет всего 38 мкВ, тогда как ring-гироскоп обладает чувствительностью, равной приблизительно 200 мкВ. Помимо того, традиционные гироскопы при отсутствии вращения в значительной степени приближаются к идеально нулевому выходу, тогда как пьезоэлектрические гироскопы выводят до 100 мВ смещения. Если управляющее напряжение является переключаемым, то же самое устройство может измерять вращение и в третьем направлении, но с меньшей чувствительностью. Устройство легко интегрируется с чипами ИС. При использовании гироскопов ring или tuning fork фактически требуется три гироскопа для детектирования трех направлений вращения.
Квантовые гироскопы
В основе квантовых гироскопов лежит эффект Джозефсона (открытый Б. Джозефсоном в 1962 году в Кембриджском университете), состоящий в том, что электрический ток может мигрировать между двумя сверхпроводящими материалами, разделенными тонким слоем изолятора.
Эффект Джозефсона стал относиться затем к поведению двух слабо связанных квантовых систем, сформированных молекулами, которые обладают идентичными волноподобными свойствами. Эффект Джозефсона относится также к соединению двух сверхпроводящих жидкостей: когда давление прикладывается к одной стороне слабой связи, жидкость будет колебаться от одной стороны слабой связи к другой.
Если взять любую трубку, сформованную в виде тора и содержащую сверхпроводящую жидкость (liquid helium-3), которая имеет два места со слабым соединением (тонкие перфорированные мембраны нитрида кремния), то приложением малых значений давлений создается волна с частотой, зависящей от давления, и амплитудой, зависящей от вращения тора и измеряемой электрическими методами. Автор этой модели первого квантового гироскопа, отличающегося сверхчувствительностью,— Ричард Паккард (Richard Packard) и его коллеги из Калифорнийского университета (University of California, Berkeley).
Основные технические факторы, управляющие рынком гироскопов
Большинство современных исследований в области MEMS-гироскопов направлено на реализацию технологий поверхностной микромеханики и создание однокристальных исполнений с 6 степенями свободы для IMU.
Как следует из теории и принципов работы, рассмотренных выше, гироскопы представляют собой сложные MEMS-устройства, интегрированные в одно устройство, включающие самонастраивающийся резонатор в управляющей оси и микродатчик ускорения в сенсорной оси. Абсолютное значение кориолисовой силы и ускорения на порядок меньше, чем ускорения, детектируемые высокообъемными автомобильными MEMS-акселерометрами.
Главной проблемой MEMS-гироскопов является достижение высоких уровней исполнений и низкой цены. Современные автомобильные гироскопы могут стоить порядка $40 для таких востребованных применений, как VSC, навигационные системы, и несколько меньше для таких применений, как обнаружение событий rollover. Характеристики гироскопов чувствительны к производственным допускам, погрешностям корпусирования, линейному ускорению, температуре. Для того чтобы достигнуть высоких объемов и низкой цены, много факторов должно учитываться еще на стадии проектирования.
Обзор современного рынка автомобильных вибрационных гироскопов
Ведущие производители автомобильных гироскопов — это Analog Devices, Bosch, Denso, BEI Systron Donner, Silicon Sensing Systems, Infineon, Matsushita, Melexis. Сравнительные технические данные некоторых устройств, рассматриваемых далее, приведены в таблице.
Таблица. Сравнительные технические данные основных коммерчески доступных автомобильных гироскопов

Гироскопы Analog Devices
Компания Analog Devices — технологический лидер в области MEMS-гироскопов, представляющих собой различные модификации камертонных гироскопов tuning forks [2, 8–12].
Технологии iMEMS® и iSensor™ Gyros компании Analog Devices составляют основу растущего семейства MEMS-гироскопов yaw rate типа. iMEMS означает акцент на полностью интегрированном решении датчика, включающего поверхностную микромеханическую структуру и схему обработки на одном кремниевом кристалле. Базовые принципы iMEMS Gyros реализованы в линейке датчиков ADXRS (рис. 6а-б).

iSensor Gyros означает дополнительную интеллектуальную функциональность гироскопов, встроенную обработку сигнала и контроль — признаки, наиболее полно реализованные компанией в линейке датчиков ADIS Gyros, значительно пополненной в течение второго полугодия 2006 года и насчитывающей в настоящий момент 7 устройств.
Гироскопы обоих семейств ADI выполнены на одном кремниевом кристалле, который включает механическую часть датчика и ASIC. Масса привязывается к поликремниевому фрейму, что позволяет ей резонировать только в одном направлении (исключение составляет только ADIS16350 — трехосевой датчик, детектирующий угловое и линейное движение). Емкостные кремниевые сенсорные элементы с неподвижными кремниевыми консолями, прикрепленными к подложке и резонатору, детектируют наведенное силой Кориолиса смещение резонирующей массы и фрейма.
Емкостные элементы представляют собой кремниевые балки, связанные с двумя настройками кремниевых балок, прикрепленных к подложке, что формирует таким образом два конденсатора с одинаковыми номиналами. Перемещение вследствие вращения наводит в этой системе дифференциальную емкость, равную 2 ??MC/gK, что прямо пропорционально угловой скорости [2]. На практике достигается высокая точность данного соотношения, с нелинейностью менее 0,1%.
Линейка семейства ADXRS включает три датчика ADXRS150 (±150°/с, $30), ADXRS300 (±300°/с, $30) и ADXRS401 (±75°/с, $22), с применением различных вариантов их корпусирования.
Все гироскопы ADXRS — это yaw-rate-гироскопы, но они могут измерять угловую скорость в направлении любой оси за счет выбора подходящего крепления. Эти устройства предназначены для систем автомобильной безопасности, навигации, стабилизации изображений, блоков инерциальных измерений, а также стабилизации платформ, в которых реализована данная технология.
Интеграция электроники и механической части на одном кремниевом кристалле — ключевой признак устройств ADXRS. Встроенная электроника гироскопов ADXRS позволяет детектировать емкостные изменения порядка 12×10–21 Ф при отклонении балок в 0,00016 Е. Дифференциальный сигнал извлекается на частоте резонатора и может быть отделен от шумов посредством корреляции. Гироскопы ADXRS характеризуются также повышенной устойчивостью к вибрациям и ударам до 1,000 g — они используют два механически независимых резонатора: для того, чтобы обнаруживать сигналы в дифференциальном режиме и сбрасывать внешние ускорения, не связанные с угловым движением. Как результат, два резонатора измеряют то же вращение, но дают выход противоположной полярности. Для измерения угловой скорости используется разница между двумя сигналами, которые поступают на входы чувствительных предусилителей. Эта схема требует точного согласования сенсорных элементов.
Портфолио гироскопов Analog Devices в последнее время значительно расширилось и включает гироскопы с более высокими рабочими характеристиками, увеличенной функциональностью, а также более эффективные в стоимостном выражении, оптимальным образом заполняющие продуктовый зазор между дорогими и прецизионными устройствами и менее дорогими датчиками. Помимо того, что непрерывно совершенствуется электроника обработки сигнала, компания ADI реализует перспективы создания мультиосевых гироскопов, интегрирующих как акселерометры, так и гироскопы на одном кристалле.
Линейка высокоинтегрированных интеллектуальных датчиков ADIS iSensor в настоящее время включает два датчика с цифровым интерфейсом SPI ADIS16100 (±300°/c, $34,95) и ADIS16080 (±80°/c, $34,95), ультрамалошумящий (0,015°/с/?Гц) аналоговый гироскоп ADIS16120 (±300°/c, $629,00), программируемые датчики с интерфейсом SPI ADIS16250 (±20…±320°/c, $41,98), ADIS16251 (±20…±80°/c, $44,95) и ADIS16255 (±80…±320°/c, $55,90) — программируемый гироскоп с температурной компенсацией. Новейшее дополнение к семейству — трехосевой гироскоп ADIS16350.
Основное назначение пополняемой линейки ADIS iSensor — повысить рабочие характеристики гироскопов ADXRS дополнительной функциональностью обработки сигнала: калибровка/тюнинг, SPI и другие ASIC-интерфейсы, цифровой ввод/вывод, встроенная интеллектуальность и программирование, управление питанием, вплоть до беспроводных связей и объединения гироскопов с акселерометрами. Гироскопы рассчитаны на различные применения, включая автомобильные — в навигации и противоугонных системах. Это однокомпонентное решение на основе технологии Analog Devices iMEMS Motion Signal Processing требует вдвое меньше пространства, чем существующие многокомпонентные дискретные решения, что также снижает системную цену и сроки подготовки производства.
Например, в ADIS16080 (рис. 6в) сигнал с механической части гироскопа подается на последовательность ступеней усиления и демодуляции. Сигнал затем преобразуется в интерфейс SPI, цифровые выходные данные которого пропорциональны входной угловой скорости. Применение внешнего резистора позволяет увеличивать измерительный диапазон. Дуальный сенсорный дизайн сбрасывает внешние g—усилия и вибрацию. Производство датчика вместе с электроникой обработки сигнала повышает устойчивость работы датчика в шумовом окружении. После стадии демодуляции интегрированный ФНЧ первого порядка ограничивает высокочастотные помехи прежде конечного усиления. Частотная полоса регулируется вторым ФНЧ, настроенным на 40 Гц. Применение внешнего конденсатора допускает снижение частотной полосы.
Посредством SPI-интерфейса обеспечивается также доступ к измерениям внешней температуры. Пользователю предоставляется возможность ввода двух аналоговых сигналов. Гироскоп снабжается двумя цифровыми входами самотестирования, позволяющими производить электромеханическое возбуждение датчика и схемы обработки. ADIS16080 выпускается в 16-терминальном корпусе LGA — 8,2×8,2×5,2 мм.
Новое дополнение к семейству датчиков iSensor, например, программируемый гироскоп ADIS16250 в корпусе с размерами LGA (11×11×5,8 мм) характеризуется малым энергопотреблением и увеличенной функциональностью.
ADIS16120 — это малошумящий датчик угловой скорости, который включает всю необходимую обработку сигнала и обеспечивает аналоговый выход, пропорциональный угловой скорости в динамическом диапазоне ±300°/с. Малого смещения и высокой точности позволяет добиться калибровка в условиях производства. Дизайн датчика обеспечивает значительную устойчивость к вариациям температуры, напряжения, линейного ускорения, вибрации и допускам при включении устройства в модуль верхнего уровня.
ADIS16250 (рис. 6г) заполняет продуктовый зазор между дорогими гироскопами ADIS16120 (±300°/с) — порядка $600 — с ультравысокими рабочими характеристиками (например, шумовая плотность 0,015°/с/√Гц) и датчиками среднего уровня ADIS16100 и ADIS16080.
Гироскоп ADIS16250 построен на семействе ADIS1620 акселерометров iSensor и представляет собой первый MEMS-гироскоп, который обеспечивает цифровое масштабирование и программируемость и предоставляет разработчику возможность одновременного контроля чувствительности, скорости дискретизации, настройки выходной фильтрации, самотестирования, цифровой функции alarm и режимов управления питанием для достижения малого энергопотребления. Выходной интерфейс датчика — SPI, обеспечивающий доступ к 14-битным данным гироскопа, 12-битным — температуры, измерениям напряжения питания, а также вспомогательный аналоговый выход.
Программирование выполняется через стандартный интерфейс. Для программирования датчика выпускается сопрягаемый с ПК оценочный комплект ADISEVAL, обеспечивающий легкий доступ разработчиков к калиброванным цифровым данным ADIS16250 и других датчиков.
В зависимости от требований к применению, чувствительность ADIS16250 может варьироваться в цифровой форме с масштабированием динамического диапазона от ±80°/с до ±320°/с. Выходы устройств калибруются при производстве датчиков. ADIS16250 также характеризуется механизмом автообнуления, применяемым для внутрисистемной калибровки и минимизации системных допусков и дрейфов.
ADIS16350 — первый интегрированный датчик ADI на основе технологии iSensorTM, обеспечивающий законченное трехосевое сканирование угловой скорости (в диапазоне ±320°/с) и линейного движения — ускорения до ±10 g в частотной полосе до 350 Гц посредством одного ультракомпактного модуля в корпусе с размерами 22,7×23,2×22,9 мм, включающего встроенную обработку сигнала для калибровки и настройки датчика. SPI-порт, рассчитанный на передачу цифровых данных и программирование, обеспечивает доступ ко всем встроенным датчикам: гироскопам в оси X, Y, и Z; датчикам линейного ускорения в оси X, Y и Z, датчику температуры, мощности, SPI-порт также имеет вспомогательный аналоговый вход. Датчики инерции представляют собой прецизионно выровненные и откалиброванные по смещению и чувствительности устройства.
Системные интерфейсы упрощаются за счет дополнительных программируемых признаков: это встроенная автокалибровка смещения, цифровая фильтрация и контролируемая скорость дискретизации, самотестирование, управление питанием, программируемый мониторинг условий с функцией alarm и вспомогательный цифровой ввод/вывод.
Гироскопы Robert Bosch
Компания Robert Bosch выпускает интегральные кремниевые вибрационные гироскопы, разработанные как для детектирования оси Z (tuning fork) — с вибрацией и направлением чувствительности в плане ИС, так и оси X или Y (vibrating wheel). Концепции Bosch показаны на рис. 7 [13–14].


Для обнаружения крена и систем навигации Bosch разработала две базовые модели датчиков с аналоговым выходом — SMG040 и SMG045. Для этих ИС необходима внешняя схема, выполняющая управление возбуждением гироскопа, усиление сигнала и некоторые другие функции. Линейка специализированных интегральных компонентов 2-го поколения, которые производит Bosch, включает аналоговый датчик для обнаружения крена SMG061 и цифровой датчик SMG060, а также датчики для навигационных систем SMG066 с аналоговым выходом и цифровой датчик SMG065. Измерительные диапазоны датчиков варьируются в зависимости от применения: ±240°/с и ±250°/с (крен) и ±75°/с и ±80°/с (навигационные системы).
Все ИС гироскопов Bosch построены на основе двухкристальной модели — микромеханического сенсорного элемента и ASIC, осуществляющей функции управления гироскопом, которые объединены в корпусе PLCC44. Сенсорный элемент представляет собой колеблющуюся массу с чувствительной осью в плоскости чипа. Микромеханическая структура уплотняется под вакуумом на уровне подложки.
Сенсорный элемент SMG040 имеет симметричный слой только с одним подвесом в точке крепления. За счет приложения электростатических сил к пальцеобразным структурам масса осуществляет угловые колебания в точке крепления в центре массы. Управляющее колебание стабилизируется электронным циклом контроля в оценочной ASIC.
Вследствие преобразования углового момента угловая скорость вокруг оси в плане чипа будет вызывать колебания массы в направлении из плоскости.
Электроды, размещаемые на подложке (detection counterelectrodes) под массой, предназначены для емкостного измерения отклонения массы. Сигналы этих электродов модулируются на частоте управляющих колебаний. После усиления и вычитания сигнал, пропорциональный угловой скорости, выделяется при помощи синхронной демодуляции. Корректную фазу демодуляции обеспечивает блок PLL.
Датчик формирует ратиометричный аналоговый сигнал, пропорциональный половине напряжения питания номиналом в 4,8 В. Чувствительность и смещение калибруются к их номинальным значениям при производстве. Тестирование механики и электроники датчика осуществляется приложением логического уровня напряжения к специальному тестовому выводу датчика BITE (Build In Test Equipment).
Сравнительные технические данные датчиков представлены в таблице.
Гироскопы BEI Systron Donner
BEI Systron Donner Automotive Division (SDAD) разрабатывает и поставляет инерциальные датчики для систем обнаружения крена и контроля динамики, а также АБС. Микромеханические кварцевые инерциальные элементы GyroChip датчиков измеряют угловую скорость вращения и линейное ускорение, используя камертонный принцип tuning fork (рис. 8). Датчики формируют сигнал, пропорциональный скорости вращения, используя пьезоэлектрические методы возбуждения и детектирования.

Кварцевые датчики инерции GyroChip производятся с использованием фотолитографических процессов и технологий MEMS, сходных с теми, что применяются при производстве кварцевых часов. Инновационные твердотельные гироскопы SDAD используют сенсорный элемент, который производится методами поверхностной микромеханики из чистого кристаллического кварца. Применение пьезоэлектрического кварцевого материала упрощает сенсорный элемент, а также обеспечивает чрезвычайно высокую температурную и долговременную стабильность, равно как и увеличенную надежность и долговечность.
В отличие от традиционных сложных механических гироскопов с сотнями индивидуальных прецизионных частей и ограниченным сроком службы, кварцевые датчики SDAD включают монолитный сенсорный элемент, работающий без режимов работы, вызывающих износ.
По сравнению с другими твердотельными технологиями, Fiber Optic Gyroscopes (FOG) и Ring Laser Gyroscopes (RLG), которые характеризуются значительными временными и денежными затратами, технология SDAD отличается простотой сенсорных элементов и удовлетворительным соотношением высокие объемы/низкая цена.
Каждый сенсорный элемент закорпусирован в герметичные металлические головные части, которые в комбинации с дискретной электроникой устанавливаются в сенсорные блоки.
Systron Donner Automotive производит различные датчики угловой скорости GyroChip — как для одноосевых измерений, так и в сочетании GyroChip с акселерометрами для мультиосевых измерений.
Одноосевые датчики GyroChip rate sensor также различным образом конфигурируются для OEM-требований. Модели, размещенные в производстве, предполагают включение встроенной непрерывной тестовой функции и адаптированные к клиентским требованиям корпус, коннектор, опции монтажа. Малые размеры сенсорного элемента позволяют добиваться малых размеров корпусов, но это зависит от OEM-требований инсталляции.
В производстве находятся и многоосевые устройства, сочетающие датчики угловой скорости и акселерометры в одном корпусе, — сенсорные кластеры, которые обеспечивают входы (например, CAN) ко многим бортовым системам, в различных стандартных конфигурациях, а также в специальных клиентских версиях.
В компании Systron Donner Automotive Division считают, что в будущих автомобилях будут использоваться автомобильные IMU (Inertial Measurement Unit) — одноточечные блоки с 6 степенями свободы, предназначенные для систем VDC, обнаружения rollover, систем навигации и других.
Гироскоп SAR10 компании Infineon
Компания Infineon Technologies SensoNor AS выпускает гироскоп типа vibrating gyro SAR10 с цифровым интерфейсом SPI для автомобильных систем обнаружения крена (±250°/с). SAR10 (рис. 9) включает два кристалла — микромеханическую ячейку и ASIC со смешиванием сигнала, размещенные в стандартном корпусе SOIC.

Для производства микромеханического датчика использована технологическая платформа SensoNor на основе однокристального кремния. SAR10 включает структуру в форме бабочки с двумя массами double mass butterfly с односторонним электростатическим возбуждением и схемой емкостного детектирования.
Принцип работы датчика, основанный на получении силы Кориолиса, состоит в следующем. Масса сенсорного элемента возбуждается, осуществляя угловую вибрацию вокруг своей оси. Входное вращение образует вибрацию, детектируемую вокруг оси, нормальной к оси возбуждения и входной оси.
Для того чтобы гарантировать высококачественную механическую поддержку для MEMS-элемента, используется анодное соединение, с применением специальных разработанных и патентованных технологий, позволяющих точно контролировать давление внутри уплотненной полости.
Для работы гироскопа SAR10 являются важными частоты и формы четырех режимов. При работе датчика активны второй и третий режимы. Второй режим структуры butterfly представляет собой горизонтальный изгиб балок, в котором массы колеблются со смещением фазы в 180° вокруг вертикальной оси. Третий режим— это кручение балок, колеблющихся в противофазе со смещением в 180°. Второй режим является режимом возбуждения и управляет постоянной амплитудой вибрации, тогда как третий режим (детектирования) измеряет угловую скорость. Другие два режима, к которым относится первый, представляющий собой кручение балок при двух синфазно колеблющихся вокруг горизонтальной оси массах, и четвертый режим — вертикальный изгиб балок при колебаниях масс со смещением в 180° вокруг горизонтальной оси, являются нежелательными и представляют собой возможное следствие внешних вибраций. Высокие частоты порядка 30 кГц делают датчик менее подверженным влиянию внешних вибраций.
Интерфейсная ASIC датчика характеризуется работой в режиме замкнутого цикла как при управлении, так и в цикле обратной связи force feedback при детектировании. Принцип работы датчика — емкостной, ASIC измеряет дифференциальные емкости в диапазоне 10–18 Ф. Этот уровень точности соответствует перемещению мембраны порядка нескольких десятков Е.
Выходной интерфейс датчика — SPI. Схема обработки включает также функции управления возбуждением, демодуляцию, фильтрацию сигнала и температурную компенсацию. SAR10 характеризуется меньшим размером, ценой и энергопотреблением. Устойчивость к ударам достигает 10 000 g. Компания SensoNor также предлагает разработчикам оценочный комплект SAR10.
Гироскопы Silicon Sensing Systems
Компания Silicon Sensing Systems использует технологию Silicon Vibrating Structure Gyroscope (SiVSG) — для создания вибрации кольца vibrating ring resonator, вибрационный режим которого изменяется при вращении вследствие действия силы Кориолиса (рис. 10).

Применение керамического колпачка, металлического кольца и использование кристаллических кремниевых и микромеханических методов позволили уменьшить кольцевой резонатор до 6 мм в диаметре.
Кольцевой резонатор дополняется центральным миниатюрным магнитом для создания электромагнитного резонанса. Передача тока осуществляется через металлические дорожки, депонированные на опоры кольца, что создает силу, которая вводит кольцо в резонанс. Движение кольца под действием силы Кориолиса определяется по напряжениям, наводимым в опорах. Таким образом, методы возбуждения и детектирования — электромагнитные.
Кольцевой резонатор устойчив к ударам (99 g). Закорпусированный сенсорный блок позволяет добиваться единичного соотношения высокие объемы производства/низкая цена, что, в свою очередь, дает возможность использовать это устройство вместе с клиентской ASIC.
Будущие разработки компании предполагают использование кремниевых емкостных технологий MEMS (рис. 10ж).
Гироскоп MLX90609 Melexis
В июне 2006 года компания Melexis представила свой первый гироскоп MLX90609 в SMD-корпусе — CLCC32, который включает кремниевую микромеханическую ячейку и схему обработки сигнала с функциями калибровки в EEPROM. Датчик MLX90609 (рис. 11) разработан с целью удовлетворения растущего спроса на автомобильные гироскопы для навигационных систем (dead reckoning GPS). Полный диапазон ±75°/с (MLX90609-N2) программируется при производстве. По специальному заказу доступны диапазоны ±150°/с (MLX90609-E2) или ±300°/с (MLX90609-R2).

MLX90609 выполнен с применением процесса thick SOI (Silicon on Insulator) и включает дифференциальную MEMS-структуру, чувствительную к силе Кориолиса при движении. Каждая часть дифференциальной структуры включает двухфреймовый гироскоп на монокремниевой основе.
MLX90609 формирует два выходных сигнала, пропорциональных с линейностью ±0,5% угловой скорости, действующей перпендикулярно плану ИС, — аналоговое напряжение с выходом в 2,5 В на нулевой угловой скорости и полным диапазоном до 4,5 или 0,5 В, в зависимости от направления вращения, а также SPI-интерфейс.
Пользователю предоставлена возможность калибровки и программирования следующих параметров: температурного дрейфа смещения и усиления, частотной полосы, даты и серийного номера.
Заключение
Гироскопы — третье из самых востребованных применений в MEMS-индустрии интегральных датчиков по объемам продаж (после акселерометров и датчиков давления) и одно из наиболее быстрорастущих в автомобильной сенсорной индустрии. Помимо автоэлектроники, востребованность гироскопов поддерживается и многими другими рынками — клиентским, медицинским, промышленным и военным, что неминуемо означает дальнейшее снижение цены и повышение уровней исполнений этих устройств.
Рассмотренные в статье гироскопы представляют собой базовые типы устройств, на основе которых разрабатываются все новые модификации MEMS. Среди них вибрационные кориолисовы гироскопы с емкостным типом детектирования представляют собой наиболее актуальные сегодня устройства, рекомендуемые для новых проектов. В дальнейшем ожидается повышение спроса как на традиционные резонансные гироскопы с улучшенными рабочими характеристиками — такими как надежность, размер и цена, так и массовая волна коммерциализации новых разработок на основе оптических технологий MEMS.
Независимо от типа применяемой технологии для гироскопов ожидается также дальнейшее повышение уровня интеграции и появление других мультисенсорных многоосевых устройств.
Литература
- Nasiri S. A Critical Review of MEMS Gyroscopes Technology and Commercialization Status. www.invensense.com/shared/pdf/MEMSGyroComp.pdf
- Geen J., Krakauer D. New iMEMS® Angular-RateSensing Gyroscope., ADI Micromachined Products Division. www.analog.com/library/analogDialogue/archives/37-03/gyro.html
- Burg A., Meruani A., Sandheinrich B., Wickmann M. MEMS Gyroscopes and their Applications. clifton.mech.northwestern.edu/~me381/project/done/Gyroscope.pdf
- Watson W. S. Improved Vibratory Gyro Pick-off and Driver Geometry. Watson Industries, Inc. Symposium Gyro Technology. Stuttgart, Germany. Sept. 19, 2006. www.watson-gyro.com/files/gyro_technology_report.pdf
- Shkel A. M. Type I and Type II Micromachined Vibratory Gyroscopes. — Mechanical & Aerospace Engineering, University of California, Irvine. www.oxide.eng.uci.edu/publications/IEEE_PLANS_2006_Andrei_Shkel.pdf
- Xie Y., Li S.-S., Lin Y.-W., Ren Z., Nguyen C. T.-C. UHF Micromechanical Extensional Wine-Glass Mode Ring Resonators. Technical Digest, 2003 IEEE International Electron Devices Meeting, Washington, DC, Dec. 8–10, 2003. eecs.umich.edu/~ctnguyen/Research/…/extWG.iedm03.yxie.ctnguyen.pdf
- Ayazi F., Najafi K. Design and Fabrication of a High-Performance Polysilicon Vibrating Ring Gyroscope., Center for Integrated Sensors and Circuits University of Michigan. Eleventh IEEE/ASME International Workshop on Micro Electro Mechanical Systems. Heidelberg, Germany, Jan. 25–29, 1998. www.eecs.umich.edu/najafi/pdf/Paper_84.pdf
- Micromachined gyros. US Patent 6,122,961. Опубл. Sept. 26, 2000. (Geen, Analog Devices, Inc.)
- Micromachined gyros. US Patent 6,505,511. Опубл. Jan. 14, 2003 (Geen, Analog Devices, Inc.)
- Micromachined gyroscope. US Patent 6,877,374. Опубл. April 12, 2005. (Geen, Analog Devices, Inc.)
- Six degree-of-freedom micro-machined multisensor. US Patent 6,848,304. Опубл. Feb. 1, 2005 (Geen, Analog Devices, Inc.)
- www.analog.com
- Bosch Micromachined Sensorsystems in Series Production. Техническая информация Robert Bosch Corporation, Research and Technology Center.
- www.semiconductors.bosch.de
- www.systronauto.com
- www.infineon.com
- www.spp.co.jp/sssj/
- www.melexis.com

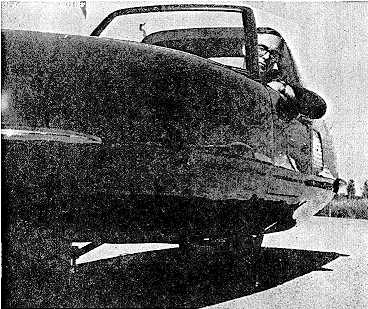
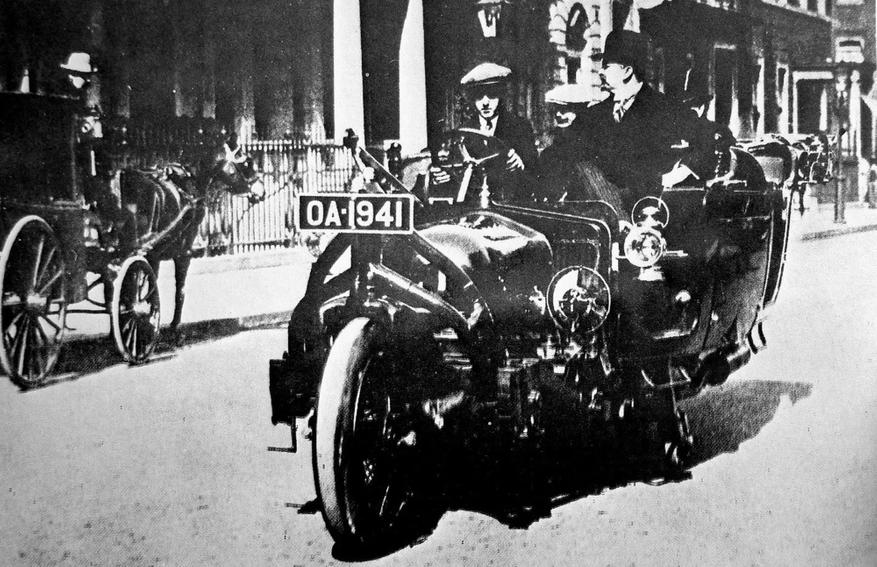
Гирокар на тестовых прогонах. Граф Шиловский справа от водителя. Гироскоп стоит за дверью в середине автомобиля.
Давайте продолжим или вернее будет сказать узнаем предысторию поста про изобреталея Петра Шиловского, которого мы уже изучали в рамках этого блога вот тут Гироскопическая железная дорога. Итак …
В 1912 году русский юрист и губернатор Костромы в отставке Петр Петрович Шиловский приехал в Лондон и показал инженерам Wolseley Tool & Motorcar Company чертежи своего странного экипажа. Странность его состояла в том, что у четырехместной машины, оснащенной двигателем внутреннего сгорания, было всего два колеса — вдоль продольной оси машины. Это, тем не менее, совсем не мешало ей двигаться на самом малом ходу и даже просто стоять на месте без всяких подпорок.
Чем же это достигалось ?

Секрет аппарата Шиловского, как догадался уже проницательный читатель, был прост: машина удерживалась в состоянии равновесия благодаря гироскопическому эффекту тяжёлого маховика.
Шестисоткилограммовый маховик представлял собою диск диаметром в один метр и толщиной почти 12 сантиметров. Для его раскрутки использовался подсоединённый напрямую 110-вольтный электромотор мощностью около 1,25 л.с. и питаемый от динамо-машины, подключённой к главному двигателю автомобиля.
Вкупе с парой 50-килограммовых «маятников» этому примитивному, но весьма внушительному гироскопу не составляло особого труда удерживать в вертикальном положении гирокар, весивший 2750 килограмм.

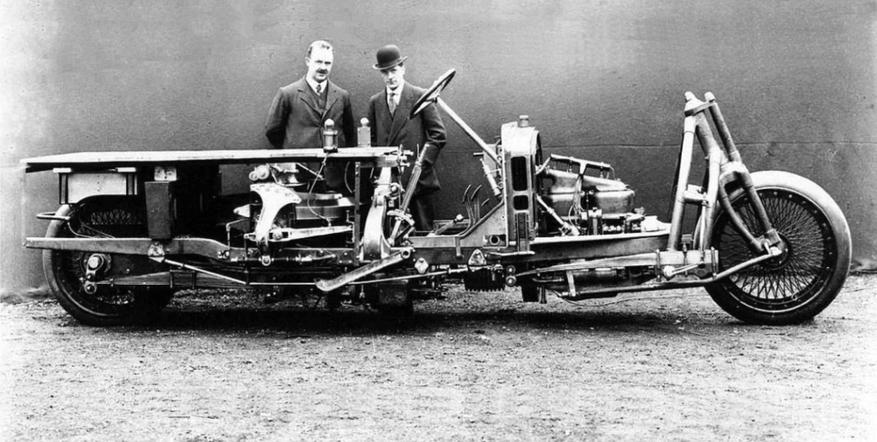
Gyrocar до установки кузова, сфотографировано незадолго до первого испытательного пробега.
Как и несколькими годами ранее Бреннан и Шерль (это немецкий инженер, который тоже строил гиролокомотив), Шиловский в 1911 году представил общественности модель гироскопической железной дороги. Но Россия, как известно, щедрая душа. Если Бреннан после такой демонстрации получил инвестиции на строительство двух полноразмерных машин, Шиловский получил дулю и похвалу от какого-то министерства. Несколько разочаровавшись, он отправился в Англию, где предложил свою концепцию крупному автомобильному заводу Wolseley.
В Англии ещё хорошо помнили Бреннана. Поэтому Wolseley взялся за постройку машины – и построил её в 1912-13 годах. Тут стоит отметить, что в 1913 году Шиловский сам подал в отставку с поста губернатора. Потому что он хотел заниматься наукой, а политика занимала слишком много времени. На родине достижения Шиловского проходили незамеченными. Он разработал гироскопическийкурсоуказатель для самолётов и судов и устройства Шиловского для стабилизации корабельныхорудий. Но все его предложения ортодоксальное министерство флота отвергало. Орудийный стабилизатор Шиловский впоследствии успешно продал британскому военно-морскому ведомству, а «Ортоскоп» всё-таки ставили на тяжёлые самолёты и в России, например, на «Илью Муромца».
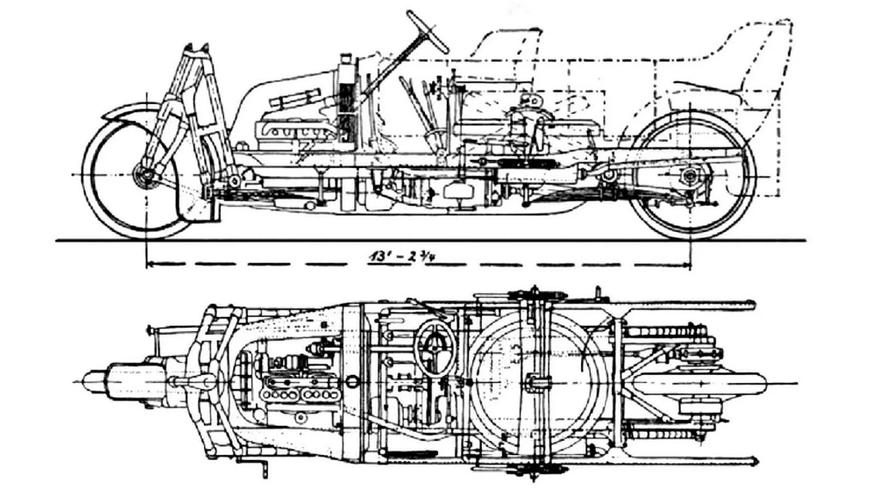
Plan of the Gyrocar. Note the large amount of space taken up by the gyroscope, and the offset driveshaft to the rear wheel. The seats are not visible on this drawing.План Gyrocar. Обратите внимание на большое количество места, занимаемого гироскоп, и смещение приводной на задние колеса. Места не видны на этом рисунке.
Вверху вид сбоку на Гиромобиль. Гироскоп находится в центре. (рисунок из книги Шиловского). Пунктиром показываются допустимые углы наклона автомобиля.
Граф утверждал, что его автомобиль будет иметь большое военное значение, он сможет пересекать местности, которые непроходимы для 4-колесных транспортных средств, и будет требовать меньше энергии для достижения той или иной скорости.
В это время автотранспорт были еще в младенческом возрасте, а также применения двигателей внутреннего сгорания для военных перевозок практически не началось. Российская армия была наименее технически передовая в Европе, и начало ее механизации с такой необычной конструкции не звучало как очень хорошая идея…
27 ноября 1913 года Шиловский рискнул провести первый опыт с гирокаром. Машину завели, раскрутили маховик гироскопа и убрали два маленьких колеса, поддерживавших гирокар во время парковки. Тот стоял как вкопанный даже при том, что находившиеся в нем люди пытались раскачивать авто. После того, как водитель несколько раз проехал взад-вперед на очень малой скорости, испытатели осмелели и объехали практически всю территорию завода, а затем выехали на одну из улиц Лондона.
Как и ожидалось, гирокар не обнаружил ни малейшей склонности к опрокидыванию даже при том, что находившиеся в нём люди пытались менялись местами, спускались на землю и вновь поднимались в открытый салон.
Даже несмотря на то, что итогом поездки стала неожиданная авария, работы над машиной продолжили, и уже 28 апреля 1914 года Шиловский решился на публичную демонстрацию своего детища в центре Лондона.
Как написал впоследствии журнал «Аэро- и автомобильная жизнь», «…Особое восхищение прохожих вызывало то обстоятельство, что коляска даже при совершенно тихом ходе не теряла устойчивости, Шиловский нарочно ехал как можно медленнее, чтобы доказать, что устойчивость его автомобиля совсем не зависит от быстроты его движения».
В качестве эксперта был приглашён знаменитый пионер гиротранспорта Луис Бреннан. Он пришёл в восторг от гирокара и честно признался, что никогда не думал о применении гироскопа в дорожном, а не в рельсовом транспорте. Итак, машина была с интересом встречена публикой, запатентована в ряде стран, в т.ч. в России, Англии и Германии, и даже сам Луи Бреннан, впервые применивший гироскоп для постройки торпеды, с восторгом отзывался о своей поездке на гирокаре Шиловского.

Итак, машина была с интересом встречена публикой, запатентована в России, Англии и Германии и даже сам Луи Бреннан, впервые применивший гироскоп для постройки торпеды, с восторгом отзывался о своей поездке на гирокаре Шиловского. К сожалению, на этом удача оставила конструктора.
Война, а затем и революция застали его в России и след его на время потерялся. Как ни странно, изобретатель не погиб на войне и не закончил свой путь в подвалах ЧК. Напротив, был обласкан новой властью и даже получил заказ на создание первого в мире гиропаровоза, который должен был ездить по монорельсовой железной дороге.

Его небольшое конструкторское бюро, в котором, помимо прочих, работали и такие талантливые инженеры, как Н.Е. Жуковский, успешно работало над проектом, а к 1921 году даже началось строительство экспериментальной ветки однорельсового пути.
И снова судьба сказала своё веское слово: разруха, гражданская война и последовавший за нею «красный террор» поставили жирный крест на планах Шиловского и едва не стоили жизни ему самому. В самый последний момент изобретателю удалось покинуть с семьёй негостеприимную родину и вновь вернуться на берега Туманного Альбиона.
А гирокар в какой-то момент был похоронен в земле. Совершенно буквально, чтобы во время войны его не повредило. Его просто закопали.

Разумеется, что там его считали давно умершим и, мягко говоря, не ожидали возвращения автора гиромобиля. Машина, стоившая ему таких усилий, уже давно была списана с баланса как ненужный хлам и лежала погребённой в земле. К чести англичан отметим, что пустить её под пресс рука всё же ни у кого не поднялась.
В 1938 году изрядно потрёпанную машину всё же «эксгумировали», починили и поставили в музей Wolseley Tool & Motorcar Company. Всё это время и до самого конца Второй мировой, Шиловский не уставал пропагандировать гирокары как транспорт будущего.

Граф Шиловский пережил Первую Мировой войну, революцию и гражданскую войну. Он вернулся в Англию, вероятно, в 1922 году. Жил в Дулвиче с женой и тремя дочерьми, и работал на Sperry Gyroscope Company.

На это фотографии (1938) его извлекают из-под земли

В 1948 году было решено провести ревизию экспозицию. Англичане и сегодня не могу объяснить, как они, столь трепетно сохраняющие свою историю, умудрились сделать такую глупость. Уникальный Wolseley Gyrocar был признан не имеющим ценности экспонатом и разрезан на металл. Пережившая войну Англия нуждалась в металле…

Вскоре, после окончания войны Шиловский умер в относительной бедности и полном забвении, а в 1948 году и его «гирокар» был вывезен из музея и отправлен на металлолом.
Гирокары строили и впоследствии. Как минимум трижды. В 1929 году Луис Бреннан, в то время в почёте и уважении работавший над гироскопическими системами устройствами для вертолётов, решил вернуться к своему раннему проекту и построил гирокар, на этот раз не рельсовый. Бреннан демонстрировал машину компаниям Austin, Morris и Rover, но успеха не имел. В 1932 году он погиб (в возрасте 79 лет), попав под машину во время визита в Швейцарию. Гирокар Бреннана:


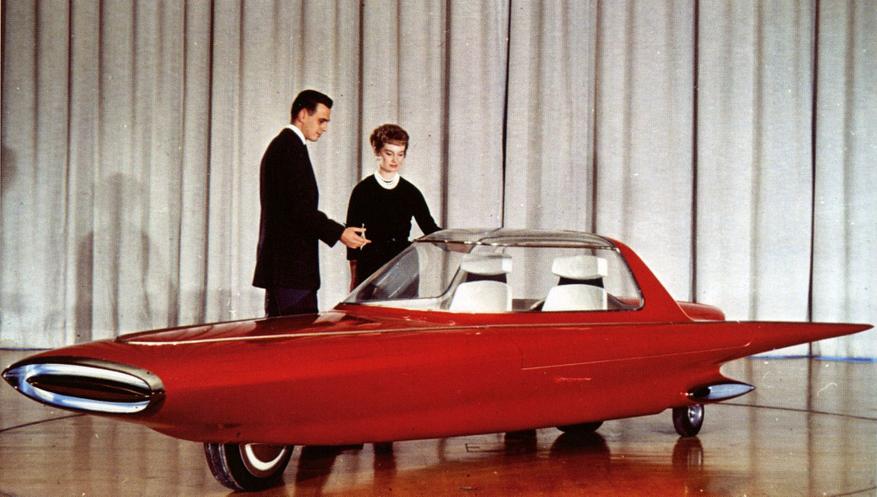
В 1961 году компания Ford представила шоу кар Ford Gyron. Правда, он не был действующим гирокаром: его просто показывали на автосалонах, как машину будущего. Но на Gyron вполне можно было установить маховик и гироскоп Бреннана или Шиловского – конструкция позволяла.
Через полтора десятка лет, прошедших после смерти Петра Шиловского, упавшее знамя подхватил новый энтузиаст — американец Луис Суинни. Его спортивный гиромобиль, имевший 80-сильный двигатель, развивал скорость свыше 125 миль в час.
Это был благословенный 1962 год. Рок-н-ролл был ещё молод, а Движение только набирало свою силу.
Американцам, ещё не растолстевшим от калорийных биг-маков и пиццы с ветчиной, хотелось молодости, скорости, и чтобы ветер бил в лицо. Естественно, что спрос на скорость не мог остаться неудовлетворённым. Слуги Великого Гироскопа тоже с удовольствием откликнулись на требование рынка.
Инженер Луис Суинни (Louis Swinney), спроектировал экспериментальную модель Gyro-X, рекламировавшийся как «первый гироскопически стабилизируемый автомобиль, который не наклоняется при поворотах».
Конечно же, пресса и рекламные конторы глубоко заблуждались, но простим им эту ошибку: если уж им так хочется во всём считать себя первыми, пусть считают. Мы-то знаем, кто был первым на самом деле.
Gyro-X, построенный на производственных площадях компании Gyro Transport Systems, создавался с дальним прицелом. Эта спортивная машина, рассчитанная на успех, должна была стать родоначальницей целой гаммы гиромобилей, начиная от семейных двухколёсных пикапов и заканчивая (чем чёрт не шутит) монстрами-амфибиями цвета хаки с грозной надписью «U.S. Army» на лобовой броне. И поэтому инженеры компании подошли к её созданию со всей основательностью.
Кабина Gyro-X походила на кабину истребителя с баранкой вместо штурвала.
Машина получилась маленькой (высотой всего 120 и шириной 106 сантиметров), но вёрткой, как мотоцикл, и стремительной, как торпеда: для того, чтобы развить скорость порядка двухсот километров в час, ей было достаточно обычного бензинового двигателя мощностью 80 лошадиных сил.
Отметим, что четырёхколёсному спорт-кару, созданному по обычной для того времени технологии, потребовался бы двигатель, развивающий, как минимум, вчетверо большую мощность.
1961 г., Ford Gyron show car.
Конструкторы попытались таким образом как можно ярче продемонстрировать естественные преимущества гирокара перед обычным автомобилем. Действительно, узкий обтекаемый автомобиль имел аэродинамическое качество в десять раз лучшее, чем у спортивного мотоцикла.
Использование всего двух колёс (тоже, кстати, предельно узких с овальным профилем) позволило самым радикальным образом уменьшить потери энергии, связанные с трением, а встроенный гироскоп избавил водителя от необходимости бороться с креном даже на самых сложных поворотах.
В прессе США, кстати, поднялась невероятная шумиха, спровоцированная появлением этого фантастического концепта. Впрочем, в самом начале второй половины 20 века каких только концепт-каров не появлялось: вспомнить хотя бы Бэтмобиль Lincoln Futura (1954) или целое поколение «газотурбинных» авто General Motors Firebird.
Gyro-X – спортивный автомобиль, он должен был стать лишь «первой ласточкой» в серии машин на гироскопах, которую хотело запустить руководство Gyro Transport Systems. Все зависело от того, насколько успешной окажется «первая ласточка». К примеру, совершенно точно известно, что боссы GTS собирались выпускать «семейные» пикапы (на двух колесах, само собой).
Параметры гирокара Суинни были таковы: высота – 1,2 м, ширина – 1,06 м, масса – 843 кг. У автомобиля было два сердца – бензиновый движок на 80 л.с. и гироскоп весом 12 кг, разработанный Томасом Саммерсом-мл. (Thomas O. Summers Jr.).
Т. Саммерс-мл., кстати, к началу 1960-х гг. разработал и запатентовал более полусотни изобретений, как нельзя более тесно связанных с гиродинамикой. Гироскоп в машине россиянина Шиловского весил 600 кг. Почувствуйте разницу, как говорится. Гироскоп в каре Суинни ракручивал полуметровый ротор, маховик, таким образом, мог «выдавать» до 6000 об./мин., чем, собственно, и компенсировался недостаток в массе.
Тот самый гироскоп Саммерса.
Гироскоп и в самом деле был сердцем автомобиля. Разработанный конструктором Томасом Саммерсом младшим (Thomas O. Summers Jr.), который к тому времени уже был владельцем 50 патентов в области гиродинамики, гироскоп весил всего 12 килограммов.
По сравнению с огромным и тяжёлым маховиком, использованным в гирокаре Шиловского, его масса действительно казалась смехотворной. Но здесь недостаток массы уравновешивался огромной скоростью вращения 50-сантиметрового ротора: на полном ходу гидравлическая система раскручивала маховик до шести тысяч оборотов в минуту.
Самое интересное состояло в том, что для своей раскрутки ротор «съедал» ничтожно малую долю мощности двигателя: всего лишь около одного процента.

Демонстрационные поездки гиромобиля производили большое впечатление на зрителей. Ротор раскручивался до положенного количества оборотов. Небольшие вспомогательные колёса эффектно поднимались и, словно в самолёте, закрывались защитными заслонками. Затем гирокар выезжал на гоночный трек и… вы можете представить себе автомобиль, закладывающий крутой левый поворот, но сохраняющий при этом гордое вертикальное положение?
Чтобы ещё больше потрясти воображение почтеннейшей публики, конструкторы подкручивали систему до режима «суперкомпенсации крена» и тогда, при том же левом повороте машина совершенно парадоксальным образом заваливалась… вправо! Разумеется, никакой практической пользы последний вариант не давал. Если, конечно, не считать состояния лёгкого изумления, в которое приходили зрители.
После того, как двигатель глушили, машина по-прежнему спокойно стояла на своих двоих, не обнаруживая ни малейшего желания завалиться на бок.
Слева направо: кузовной дизайнер Алекс Тремулис и Томас Саммерс.
Как утверждали конструкторы, даже в случае непредвиденной остановки двигателя где-нибудь на светофоре, водитель имел не менее получаса на то, чтобы попытаться снова запустить двигатель или же спокойно дотолкать машину до ближайшей парковки и поставить её на вспомогательное шасси.
К сожалению, именно ротор, а точнее — проблема его раскрутки, стал не только главным достоинством, но и главным недостатком Gyro-X.
Даже при самых удачных условиях водителю требовалось не менее трёх минут, чтобы раскрутить его до рабочей скорости. Согласитесь, не самый лучший вариант в ситуации, когда нужно быстро «рвать когти» с места бандитской разборки в каком-нибудь Гарлеме.
В 1962 году американский энтузиаст Луис Суинни на площадях компании Gyro Transport Systems построил гирокар Gyro-X. Дизайн разработал сотрудник Ford Алекс Тримулоус (легенда авангарда в автодизайне), а гироскоп – инженер Томас Саммерс. Лёгкая, очень скоростная машина, почти мотоцикл, не произвела впечатление на потенциальных инвесторов. Судьба её неизвестна – скорее всего, её уничтожили в том же году. Сохранилось лишь несколько фотографий и полная техническая документация, доказывающая то, что эта машина была способна на движение.


История умалчивает о дальнейшей судьбе Gyro-X, но, судя по всему, машина так и не пошла дальше демонстрационных образцов. То ли бензин тогда был слишком дёшев, то ли американцы не смогли просто так отказаться от своей любви к шестиметровым дредноутам из Детройта.
А может быть маркетологи Gyro Transport Systems проиграли рекламную войну своим конкурентам, обслуживавшим интересы производителей четырёхколесных машин.
Так или иначе, но всё, что оставила нам история — эти чёрно-белые фотографии сомнительного качества и немногочисленных фанатов гиротранспорта, всё ещё пытающихся реанимировать идею двухколёсного городского авто.

А вот современные творения. Авторы нового транспортного средства называют его первым в мире гиростабилизированным катящимся смартфоном (Rolling Smartphone), так как этот умный аппарат сможет выходить в Интернет. Такое умение по нынешним временам — банальность. Но вовсе не электроника привлекает внимание в новинке.
Американская компания Lit Motors разработала двухместный электрический мотоцикл с закрытым кузовом C-1. Правда пока он существует лишь в виде полноразмерного макета.
Изюминка конструкции – пара маховиков, установленных под полом аппарата. Теоретически, они придадут машине хорошую устойчивость за счёт гироскопического эффекта. Даже на месте этот электробайк сможет подолгу стоять вертикально, так что во время посадки и высадки аппарату не понадобится подпорка.

C-1 являет собой воплощение столетней идеи на новый лад. Напомним, шествие стабилизированных маховиками двухколёсных автомобилей началось с гирокара Шиловского.
Неизвестно, впрочем, знал ли о своём давнем предшественнике основатель и глава Lit Motors Дэниел Ким (Daniel Kim). Но команда Кима постаралась учесть ошибки целого ряда похожих проектов прошлого, ни один из которых не совершил революции в транспорте, несмотря на все авансы, раздаваемые странным машинам самими изобретателями.
Прежние двухколёсные аппараты с маховиками, обеспечивающими вертикальное положение конструкции, по отзывам специалистов, неважно вели себя в скоростных поворотах. Ким и его коллеги постарались решить эту проблему. В C-1 маховики закреплены в подвижном подвесе, а управляться вся эта хитрая система должна электроникой.
В движение гироцикл от Lit Motors будут приводить два электромотора в ступицах колёс. Их общая мощность составит 40 киловатт. Максимальная скорость C-1 должна превысить 190 км/ч.
Что касается основного хранилища энергии на борту, то это будут химические аккумуляторы, видимо, литиевые. Причём Lit Motors планирует создать две версии аппарата.
Для развивающихся стран и не самых состоятельных покупателей американцы намерены предложить модель чуть-чуть подешевле, с аккумулятором на 4-6 киловатт-часов. А топ-версия немного подороже должна щеголять батареей на 8-10 кВт-ч.
В последнем случае запас хода мотоцикла составит 240-355 километров. Этого более чем достаточно для ежедневных разъёздов по городу.
Из современных примеров скрещивания мотоцикла с автомобилем стоит вспомнить швейцарский Zerotracer, в минувшем году успешно прошедший кругосветку, и его собратаE-Tracer. Но в тех машинах проблема поддержания вертикального положения во время остановки решалась куда проще – за счёт пары выдвигающихся боковых колёс.
По информации Gizmag, первая пробная партия C-1 должна была выйти на рынок в конце 2013 года по цене около $24 тысяч, а в конце 2014-го Lit Motors планирует начать серийный выпуск электробайка. Тогда стоимость этой машины упадёт до $16 тысяч. Как сейчас реально обстоят дела с этим транспортным средством я не знаю.
[источники]
источники
http://andriuha077.narod.ru/cad/gyrocar.html
http://nostradamvs.livejournal.com/309457.html?thread=5337809
http://www.membrana.ru/particle/17374
http://alternathistory.org.ua/girokar-petra-petrovicha-shilovskogo
А вообще меня очень сильно удивила в свое время история про МОНОЦИКЛЫ. Вот что я вам еще могу напомнить про достаточно интересные транспортные средства: вот посмотрите на Самый быстрый грузовик в мире, а вот пожалуйста Самый низкий автомобиль в мире и Самый длинный автомобиль в мире. Давайте вспомним еще про Электромобили СССР и что это за Антарктический вездеход Snow Cruiser
From Wikipedia, the free encyclopedia
The Gyroscope was a brass era automobile built in Detroit, Michigan first by the Blomstrom Manufacturing Company in 1908, and then the Lion Motor Car Company in Adrian, Michigan in 1909. The Gyroscope was so named because of its engine, a horizontal, opposed two-cylinder engine, which had a horizontal flywheel. They claimed the vehicle increased stability and prevented skidding with this powertrain setup. Although other companies had this type of layout, the Gyroscope was the only one to claim its stability effect. The 16 hp engine connected to a friction transmission and shaft drive, with three body styles available.
References[edit]
- G.N. Georgano (1968). The Complete Encyclopedia of Motorcars, 1885 to Present. New York, Dutton.
Активная подвеска и гироскопы
Многие знают, что в автомобилях вот уже несколько десятилетий широко используются датчики ускорения (акселерометры) в охранных целях. Это тот самый датчик, который замечает поддомкрачивание, попытку погрузить машину на эвакуатор, даже просто прикосновения с небольшим сотрясением. В этих системах используется не полноценный гироскоп, а его упрощенный аналог — акселерометр, наподобие того, который есть в каждом современном смартфоне. Более интересная ситуация с гироскопами в подвеске.

Какие ставятся задачи подвеске?
Задача подвески — смягчать сотрясения автомобиля, возникающие из-за дорожных неровностей. Гироскопы позволили бы автомобилю «помнить» положение кузова до сотрясения и стабилизировать его в таком положении по мере возможностей подвески, уменьшая или увеличивая её жесткость. Типичная ситуация — прохождение поворота. Мягкая комфортная машина с длинноходной подвеской сильно накренится в сторону. Про такие машины говорят, что они «валкие», это действительно неудобно.
Современные технологии позволяют на время прохождения поворота временно увеличить жесткость подвески с одной стороны, а с другой, наоборот — уменьшить. В результате машина остается мягкой и комфортной, но перестает быть валкой. Такую задачу можно реализовать исключительно при наличии активного компонента с быстро изменяемой жесткостью. Тут есть два варианта:
- пневматическая подвеска (распространенный вариант, но требующий сложной конструкции);
- ферромагнитные амортизаторы (инновационное решение с перспективным будущим).
 Пневматическая подвеска (разг. «пневма») уже становится достаточно распространенной. Почти у каждого крупного автопроизводителя есть в ассортименте несколько моделей с «пневмой». Решение проверенное, но технически сложное. Нужен компрессор, ресивер, пневмобаллоны на каждое колесо. Стоимость авто существенно возрастает, не говоря уже о сложности обслуживания.
Пневматическая подвеска (разг. «пневма») уже становится достаточно распространенной. Почти у каждого крупного автопроизводителя есть в ассортименте несколько моделей с «пневмой». Решение проверенное, но технически сложное. Нужен компрессор, ресивер, пневмобаллоны на каждое колесо. Стоимость авто существенно возрастает, не говоря уже о сложности обслуживания.
 Ферормагнитные амортизаторы (рагз. «магнетики», Magnetic Ride Control или MRC) обещают сделать техническую революцию в подвесках автомобилей. Выглядят они так же как и обычный амортизатор, но имеют электрический разъем. Внутри них находится ферромагнитная жидкость, которая при подаче тока мгновенно застывает. Путем регулирования тока ее можно сделать жидкой, вязкой и очень вязкой.
Ферормагнитные амортизаторы (рагз. «магнетики», Magnetic Ride Control или MRC) обещают сделать техническую революцию в подвесках автомобилей. Выглядят они так же как и обычный амортизатор, но имеют электрический разъем. Внутри них находится ферромагнитная жидкость, которая при подаче тока мгновенно застывает. Путем регулирования тока ее можно сделать жидкой, вязкой и очень вязкой.
Получается, что магнитная жидкость в амортизаторах обеспечивает такой же эффект, как и пневматическая подвеска. При этом не надо никакого компрессора, ресивера, баллонов, клапанов и трубопроводов. Достаточно маленького электронного блока управления и пары проводов к каждому амортизатору. Такие авто появятся в будущем. Конечно, машины с Magnetic Ride Control выпускаются и сейчас, но их ассортимент пока еще очень мал, а цена очень высокая.
Широкому внедрению магнитных амортизаторов мешает сама ферромагнитная жидкость. Она стоит очень дорого, имеет высокую абразивность, постепенно теряет свои свойства со временем, то есть получается, что амортизатор уже не может увеличивать свою жесткость. В настоящее время в мире ставится на машины уже 3-е поколение Magnetic Ride Control и их характеристики постоянно улучшаются.
Машины со сложной подвеской нуждаются в хорошо отбалансированных колесах. В статьях в нашем блоге мы подробно разбирали, каким образом дисбаланс на колесе в несколько граммов на скорости превращается в килограммы. В этом случае подвеска «пляшет в такт» вращения собственных колес. Ни о каком высоком сроке службы тут и говорить не приходится. Чтобы не допускать такой ситуации, делаете своевременную балансировку колес.
Приглашаем вас на шиномонтаж, балансировку колес, покраску дисков. Мы выполняем все шиномонтажные работы на оборудовании немецкой компании Hoffman. Находимся в САО Москвы. Рядом Химки и город Долгопрудный. Проезд по Дмитровскому и Коровинскому шоссе.
Для работы проектов iXBT.com нужны файлы cookie и сервисы аналитики.
Продолжая посещать сайты проектов вы соглашаетесь с нашей
Политикой в отношении файлов cookie
Современные автомобили часто винят в том, что даже в самых новых моделях нет ничего интересного с точки зрения технологий и технологичности. Сетуют, что да — уменьшился вес, изменился дизайн, увеличился запас хода или повысился комфорт, однако, это все мы видели и в предыдущих поколениях. Что-то радикальное в конструкциях в последнее время встречается не так уж и часто. Поэтому обратимся к истории развития автомобилей и посмотрим, может быть изюминку можно найти где-то там? Одним из таких интересных концептов, опередивших свое время, была конструкция гирокара, о нем и пойдет речь.

Идея создания двухколесного транспортного средства, появилась в умах изобретателей с самого начала появления самодвижущихся повозок (ведь велосипеды, в своей массе, были двухколесными). По сравнению с трехколесным или четырехколесным у двухколесного транспорта есть ряд преимуществ: более простая конструкция и вес, меньшие габариты, лучшая динамика при сопоставимых технических характеристиках. Все это, как Вы понимаете, про мотоциклы. Однако, у классических двухколесных мотоциклов по сравнению с автомобилями есть и недостатки: невысокий комфорт при передвижении, неустойчивое положение в неподвижном состоянии, сложность управления, особенно на высокой скорости и извилистой дороге, малая грузоподъемность. Вот и пришла идея решить задачу совмещения преимуществ мотоциклов и автомобилей в одном механизме. Так возникла концепция гирокара.

Основной изюминкой гирокара является использование в конструкции механизма гироскопа, который в рабочем состоянии обеспечивал бы крайне устойчивое положение двухколесному транспортному средству как в положении покоя, так и в движении. Идеологом такой концепции применения гироскопа был русский отставной костромской губернатор и граф, а по призванию изобретатель и инженер Петр Петрович Шиловский.
Изначально использование гироскопа он предложил для постройки монорельсовой дороги по которой бы перемещался двухколесный состав, удерживаемый в вертикальном положении маховиком гироскопа, раскручиваемым электромотором. Свою модель он представил в 1911 году на выставке к 75-летию пуска первой железной дороги в России. А затем и получил патент на изобретение в нескольких странах.
Начало XX века было непростое и свое изобретение Шиловский предложил также для использования в устройстве стабилизации корабельных орудий, а для самолетов был построен прибор ортоскоп — гироскопический курсоуказатель.
Но вернемся к автомобилям. Построить двухколесный автомобиль — гирокар Шиловскому удалось только в Англии. По его чертежам, разработать и реализовать его смогли в автомобильной компании The Wolseley Tool and Motor Car Company Limited. В итоге автомобиль был построен и его испытания начались в 1913 году. Кстати, было мнение, что двухколесный гирокар будет обеспечивать лучшую проходимость, динамику и экономичность там, где современные ему четырехколесные собратья бы пасовали.
Автомобиль оснастили трехлитровым двигателем Wolseley-С5 мощностью 25 л.с., который десятую часть своей тяги передавал на динамомашину к которой был подключен электромотор, раскручивающий метровый маховик гироскопа весом целых 600кг, располагавшийся в задней части машины. После раскручивания маховика до рабочих 2000-3000 оборотов и убирания двух поддерживающих колесиков, стабильность автомобиля поразила всех зрителей и участников испытаний.
Баланс автомобиля не изменялся при любых перемещениях пассажиров, толчках и других попытках уронить машину. Автомобиль ездил и его официальная презентация была проведена в 1914 году в Лондоне. Прокатившиеся на авто отмечали отсутствие кренов в поворотах и крайнюю стабильность даже при минимальной скорости езды. Правда система управления была не самая удачная, в ее конструкции использовались два пятидесяти килограммовых маятника с противовесами и радиус поворота был достаточно большой, а общий вес машины составлял 2750кг.
Реалии, к сожалению, перечеркнули успех и дальнейшее развитие идей двухколесного авто Шиловского. Первая Мировая не позволила перевести проект в промышленное русло. Единственный экземпляр, с целью сохранения, был закопан на территории завода Wolseley до лучших времен, где он и пролежал до 1938 года. Далее машина была восстановлена и поставлена в музей завода, однако, уже через десять лет, в 1948 году, признана не представляющим ценности экземпляром и переработана на металл.
Шиловский вернулся в Россию, где с 1921 по 2922г. занимался строительством монорельсовой железной дороги Петроград — Детское Село — Гатчина, по которому должен был курсировать поезд с гироскопом. Состав планировался из двух вагонов и скоростью движения целых 150км/ч, что для того времени было очень круто! Однако, удалось построить только двенадцать километров пути, после чего финансирование стройки прекратилось и проект был свернут.
В дальнейшем к теме гирокаров возвращались в разных странах, интерес к ним проявляли даже крупные корпорации. Например, в 1961 году вышел концепт Ford Gyron. В концепт-каре было 2 места в ряд, причем управлять автомобилем можно было с любого места. А два опорных колеса убирались в кузов после раскрутки маховиков гироскопов. Это был только прототип, подтверждения о его реальных поездках нет.
Более интересным является история гирокара Gyro-X, появившегося в результате усилий энтузиаста гирокаров Луиса Суинни в начале шестидесятых годов. Гирокар строился компанией Gyro Transport Systems и на его модификации были достаточно амбициозные планы не только в качестве гражданского, но и военного транспорта.

В 1967 году появился рабочий образец Gyro-X. Характеристики гиро-автомобиля были следующие: высота 1.2 м, ширина — 1.06м, вес 839кг. Мощность двигателя составляла 1275 куб.см (от Austin Mini Cooper S), он выдавал 80 л.с., однако был способен разогнать «торпеду» до 201км/ч, чтоб было недостижимо для такой невысокой мощности двигателя четырехколесным авто того времени. Маховик гироскопа,обеспечивающий устойчивость двухколесного автомобиля, имел диаметр 56 см и весил всего 12 кг, в рабочем режиме раскручивался до 6000 об.мин.

Машина демонстрировала отличную вертикальную устойчивость и на дорогах и на наклонном треке. После остановки, инерция маховика обеспечивала устойчивость машине более тридцати минут, но вот выход на рабочий режим занимал около трех минут, что являлось существенным недостатком. К сожалению, и данная попытка популяризировать гирокары провалилась, хотя впоследствии неоднократно предпринимались попытки вернуться к данной теме.
Видео про Gyro-X
Принцип работы:
Более-менее успешным можно считать использование гироскопов в качестве движителя на пассажирском транспорте в Швейцарии. Гиробусы, переделанные из обычных автобусов, оснащались электромахавичными гироскопами, только их цель была не в фиксации устойчивого вертикального положения а в запасе энергии маховика, которую он передавал на электродвигатель, а он, в свою очередь, обеспечивал вращение колес транспорта. Для регулярной раскрутки маховика на остановках были установлены контактные перекладины, подключенные к городской электросети, к ним подключались выдвижные штанги гиробусов. На запасе энергии накопленной маховиком, такое передвижное средство могло проехать до 6 км. Маховик имел диаметр 1.5м, раскручивался до 3000 об.мин, и весил около полутора тонн, для уменьшения трения и снижения нагрева его погружали в герметичный кожух заполненный водородом. Ездили такие гиробусы до 60-х годов XX века.

Из более современных попыток построить гирокар можно отменить компанию Lit Motors из Калифорнии, которая в 2014 году планировала запустить в серию модель C-1 на базе двухстепенного гиростабилизатора, однако и в данном случае что-то пошло не так. Серийных моделей мы не увидели.

Кстати, уже и мотоциклы умеют стоят без опоры, например, ниже видео от Хонда. Только в данном случае в качестве средства устойчивости в вертикальном положении выступает не гироскоп с маховиком, а электроника, которая улавливает положение мотоцикла в пространстве и выполняет постоянные микроподруливания передней вилкой, чтобы аппарат сохранял устойчивое положение.
В завершение можно сказать, что многие идеи, кажущиеся фантастическими в свое время, находят практическое применение через много-много лет, а другие так и остаются красивым, но не практичным событием, но так или иначе, все это неумолимо двигает технический прогресс вперед 